There are many ways to calculate the mechanical advantage of a simple machine.
One way is the “kinematic” way, which is implemented by knotsaver. In this, we examine how the shape / geometry of the mechanism varies during its extension or contraction. If we see that the point on which the load is attached moves distance X, and the point of the line which we drag, in order to lift this load, moves distance Z, then the mechanical advantage is Z / X. HOWEVER, you should do this only if you have a mechanism which is in a state of equilibrium, that is, which is not expanding or contracting by itself, even before you think to expand or contract it by yourself ! The Poldo tackle is NOT such a mechanism : In the ideal case, when there is no friction, it will expand by itself, and become maximally extended.
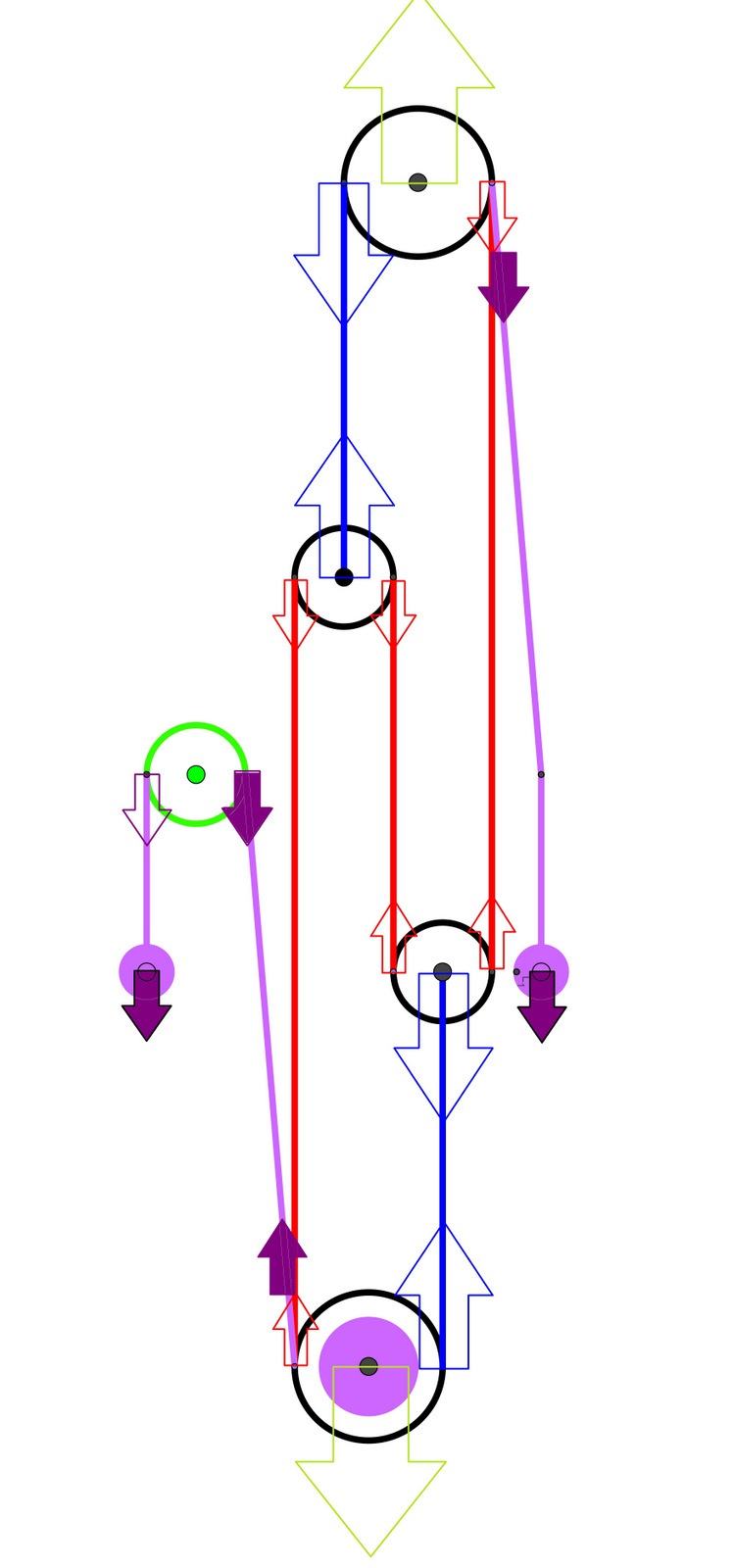
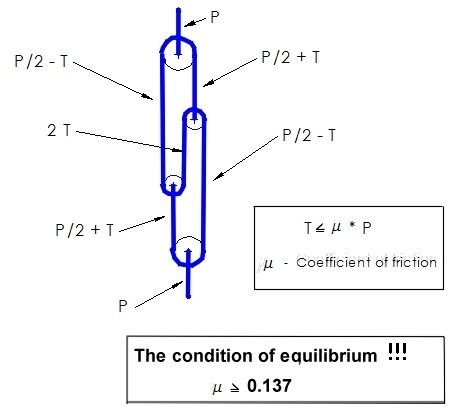
In order to transform it into a mechanism which is static, and so we can then study the mechanical advantage it offers when we put it in motion ( remember, we are talking about uniform motion, NOT acceleration ! ), we have to “add” forces. The interested reader will see the two forces F, indicated by the purple arrows, in the sketch of the Poldo tackle in equilibrium shown in a previous post.
THAT is knotsaver s omission / “mistake” : he examines the mechanical advantage of the mechanism, when it is in equilibrium, and he, correctly, finds it to be 4 : 1 - but the Poldo tackle itself, without the addition of the forces F ( or the existence of friction forces, which play the same role ), is NOT in equilicrium ! If we take into account the work consumed by the application of the forces F, or the additional work needed to overcome the equivalent friction forces, we see that the 4 : 1 mechanical advantage is reduced by half, and becomes 2 : 1.
The second way is the “dynamic” way. One analyses the forces acting on each part of the mechanism, and he is assured that the ( “vector” ) sum of those forces, in each and every part of them, is zero. On each and every pulley, the forces are supposed to be counterbalanced, each of them cancels the effect of all the rest, so the pulley does not start moving to somewhere by itself ! 
Then, AFTER one has found all those forces, he should probably add some more, which would be missing, if the mechanism by itself is not static. In the case of the Poldo tackle, due to its simplicity and symmetry, it is very easy to do this - in more complex structures, it may become very difficult… The interested reader will see, at a glance, how the F forces counterbalance the rest. ( Note : In this sketch, I should had also shown, by long green arrows, the forces acting on the tackle by the load, on the axle of the one end-pulley, and by the anchor, on the axle of the other end-pulley - but I had not enough space to do this ! The diagram was already very long, and those forces are 4 times as strong as the F forces, pointing outwards…)
After the addition of those “counterbalancing” F forces, the calculation of the mechanical advantage is a piece of cake : If those forces are, say, 2F ( as in this case ), and the load is 4L, the mechanical advantage is the ratio of the sum of forces acting on the lines of the tackle to raise the load, divided by the load to be lifted - that is , 4l / 2l = 2 : 1.
Of course, this is the “ideal” case : Actually, in “real” cases, there are always friction forces acting on the mechanism, so, when its expansion or contraction takes place under load, the forces we “feel” we have to apply, to lift the load, are not the one half, only, of it… However, we always calculate ideal mechanical advantages, because friction can not be taken into account so easily : it may depend on many things, it may be not-linear, it may depend on the speed the mechanism expands or contracts, it may vary during some phases of the change of the overall shape of the mechanism, etc.
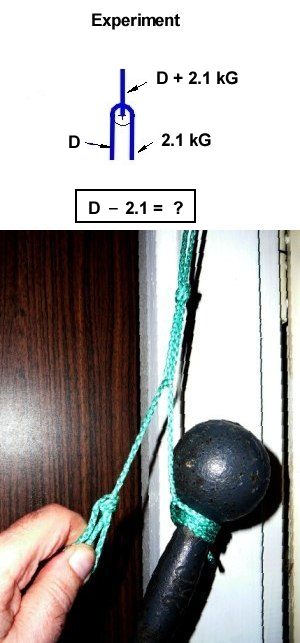
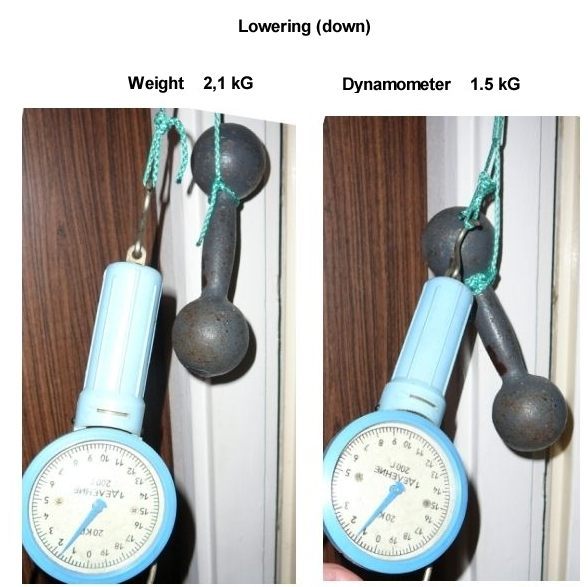
I have seen that knot tyers are not very happy, when they want/need to calculate mechanical advantages ! So it may be more interesting, and useful for us, to just TRY an actual “real” mechanism, using free-rotating, bearing-made pulleys, and slippery Dyneema fishing lines, and MEASURE the “real’ mechanical advantage by themselves. I am very interested to learn how much the 'real”, measured mechanical advantage of the Poldo tackle will differ from the “ideal”, 2 : 1 one…