This topic intends to offer a simplified method of cf measurement and will then attempt an analysis and breakdown of the Munter hitch as requested by Agent Smith.
Lowering Weight method for cf measurement.
Considerations:-
The method is based on the Capstan formulae and suffers the limitations this formulae faces when it meets the ‘real world’. Despite these limitations the method offers a rapid, simple and inexpensive means of determining cf for cordage on typical belay materials and a means of extrapolating this to simple cord vs cord systems.
Materials and equipment
A Luggage scale
This does not have to be highly accurate (all measurements are going to be comparative) but it should be reasonably linear.
Reference weights to measure linearity : I happen to have a 2kg and a 1kg Instron reference weights, but so long as you have two weights the same (roughly 1kg) you will be able to check your scale linearity at 0kg, 1kg and 2kg.
A Carabiner I used a DMM belay bina - ideally it should have a flat belay section to keep the coils from riding up the sides.
A Stand to hang the bina and scales (coathook on the back of a door is ideal)
Cordage I used 550 nylon Para-cord
A Notepad to record results
A Calculator that has the ln function (Natural log)and the pi constant.
Setup
Suspend the bina on the test stand so that it hangs ca 1m from the floor
Suspend the scales above the bina so that the attachment point is ca 20cm above the bina
Calibrate
Turn on the scale and check that they read zero
Hang the ca 1kg weight on the scale and record the result
repeat with the 2kg weight and record
hang both the two and the one kg weight on the scale and record the weight..
Check that the results are linear progressions i.e. multiples of x1, x2 and x3. If the results are not linear by more than ca 20g, send the meter back to Amazon. Today. most cheap load cells are amazingly accurate.
cf Measurement
Tie a 1m length of 550 Paracord to the scale load point and tie the 2kg weight to the bottom of the cord.
Record the scale readout this will be the 0 turn value or Load input
Now make a single turn about the bina spar. lift the weight and support the weight just below the scale.
Lower the weight so that the coils tighten on the spar but the weight is still held up from reaching the scale.
Check that the scale reads zero.
Gently lower the weight so that the scale starts to take the weight. The cord will gently flow around the bina until the scale takes the weight. Allow the weight to gently settle and for the slow creapage of load to stabilise. The weight now displayed is the load out after one turn of cordage has stolen a proportion by friction.
Record the weight for 1 turn.
Lift the weight again and make a second turn around the bina. Again, while supporting the cord below the scale, allow the weight to settle onto the coils on the bina. Make sure the coils do not overlap.. Now again, gently allow the load to slip the turns by gently lowering the weight onto the scale. Again, wait for the the creep to settle and record the scale value for 2 turns.
Repeat this process for 3 and 4 turns.
Now do it all again and see how good your reproducibility is. you should aim to eliminate variations until your results do not vary by more than ca 60g
Now for the calculator magic.
enter the T0 value and divide it by the T1 value. This is the ratio of Lin to Lout.
Now press ln - this will give you the natural log of of the ratio.
Now divide this by pi and then by 2 (this is because there are 2 pi radians in a single full turn.
The result is the static coefficient of friction for your cord against your bina.
Record the result.
Clear the calculator and start again by diving T0 by the T2 value.
proceed as before ln, then divide by pi, but now because the test had 2 turns, there are 4 pi radians, so divide by 4.
Record the result of cf for a 2 turn capstan.
You should see where this is going, repeat for the 3T and 4T results but divide by 6 and 8 respectively.
The results should all be relatively similar. My trials turned out to be between 0.082 and 0.09 but there were a few cranky results that turned out to be due to me letting the cords catch on the shelving or not letting the results settle.
Give it a try and share your results.
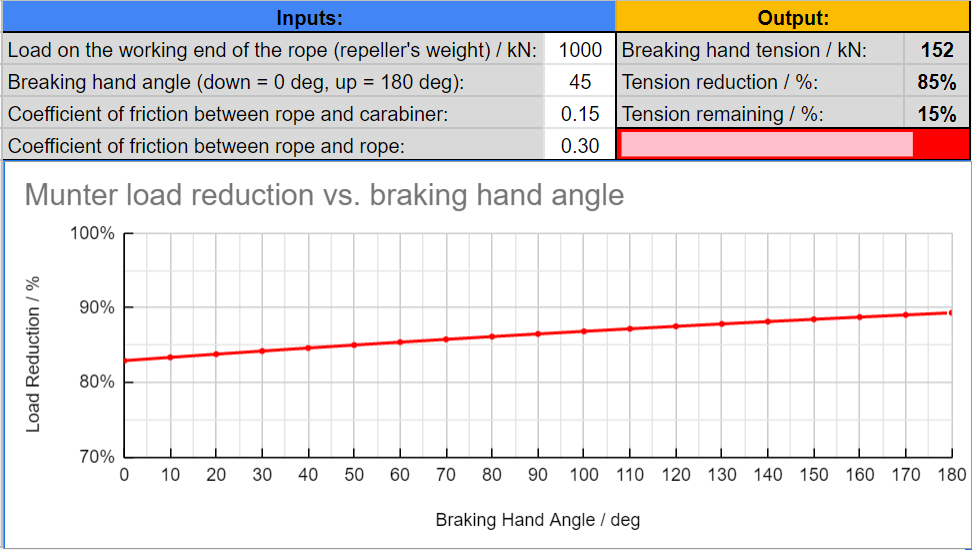
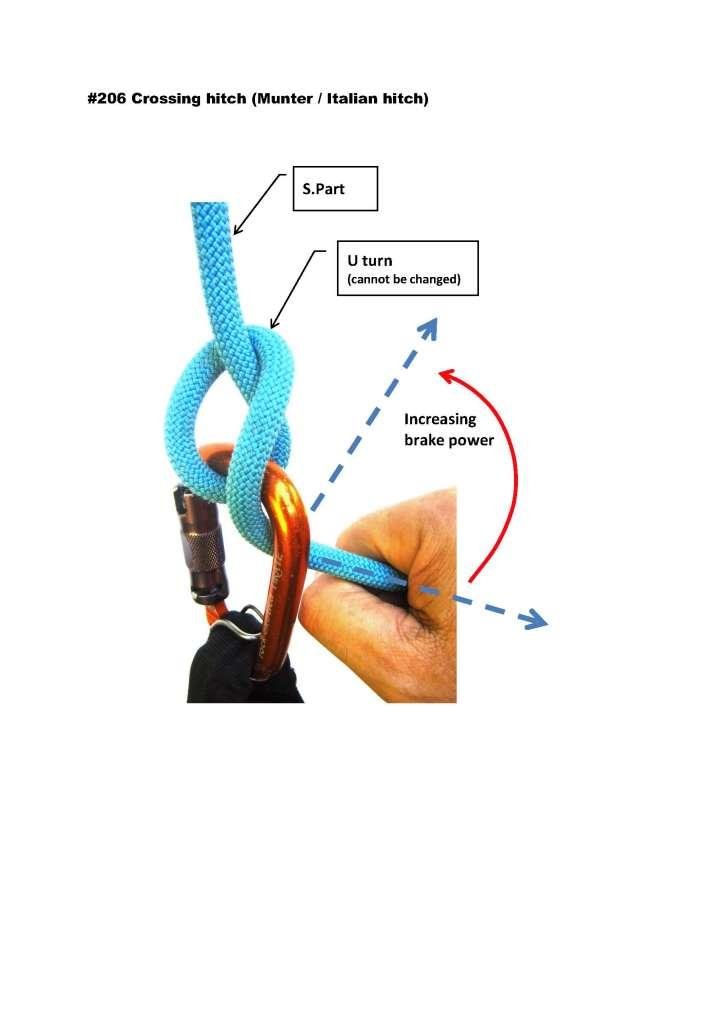
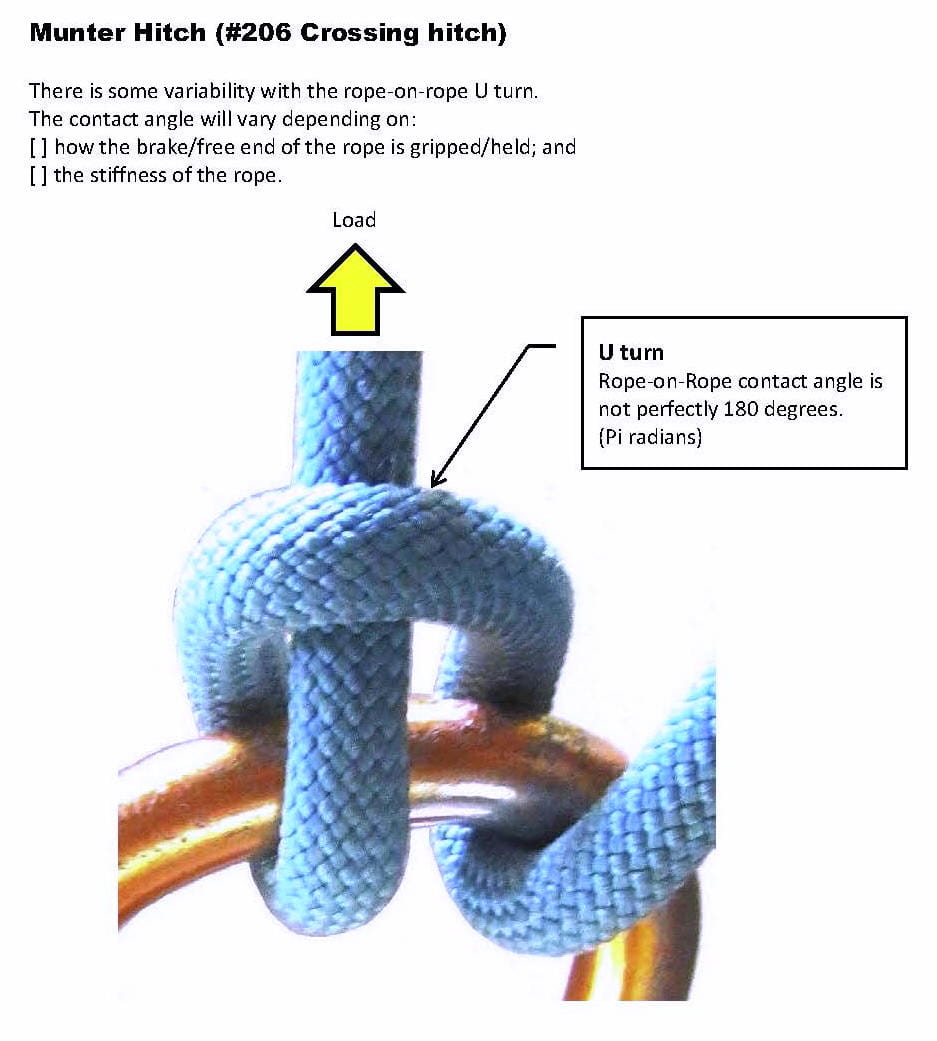
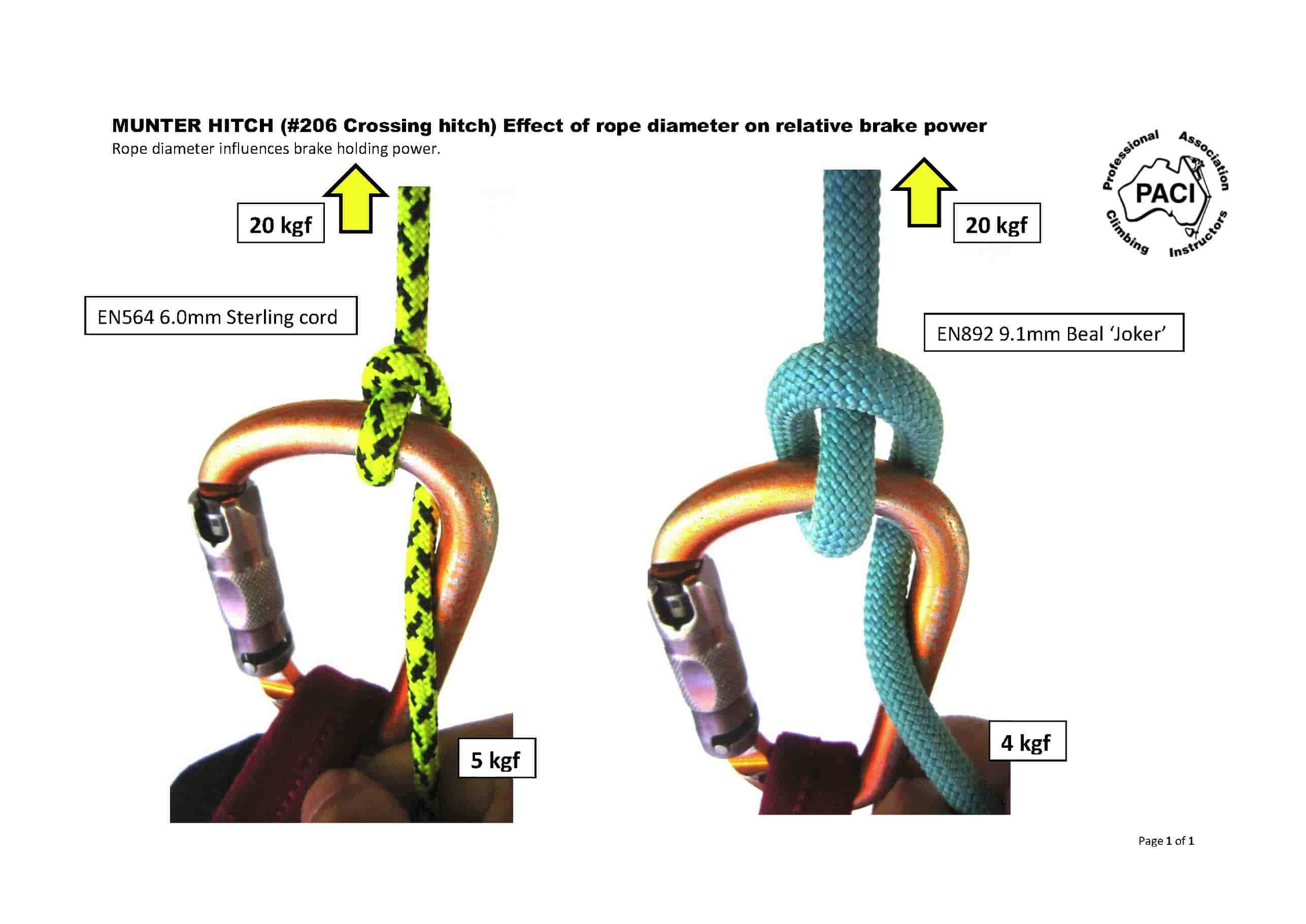
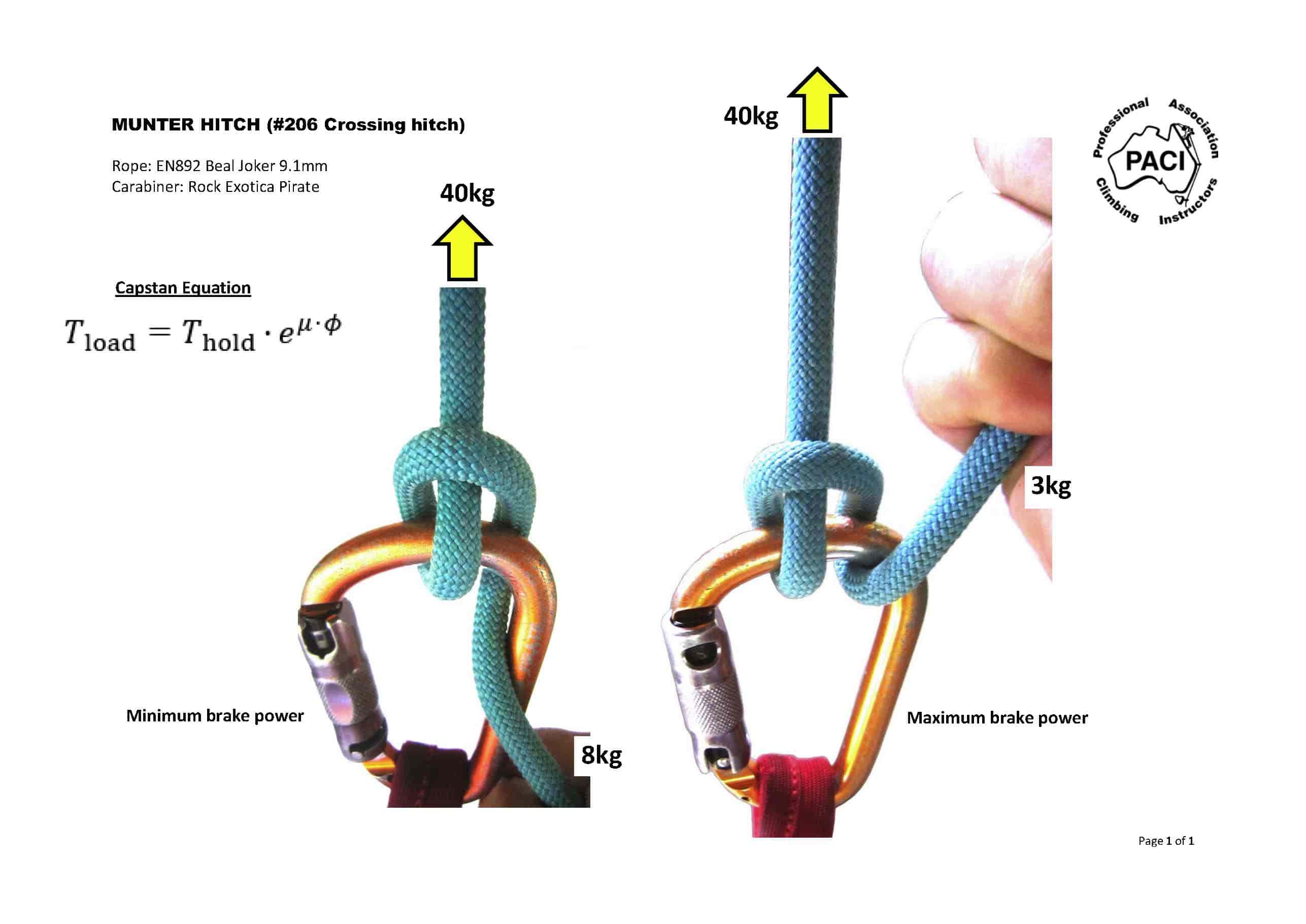
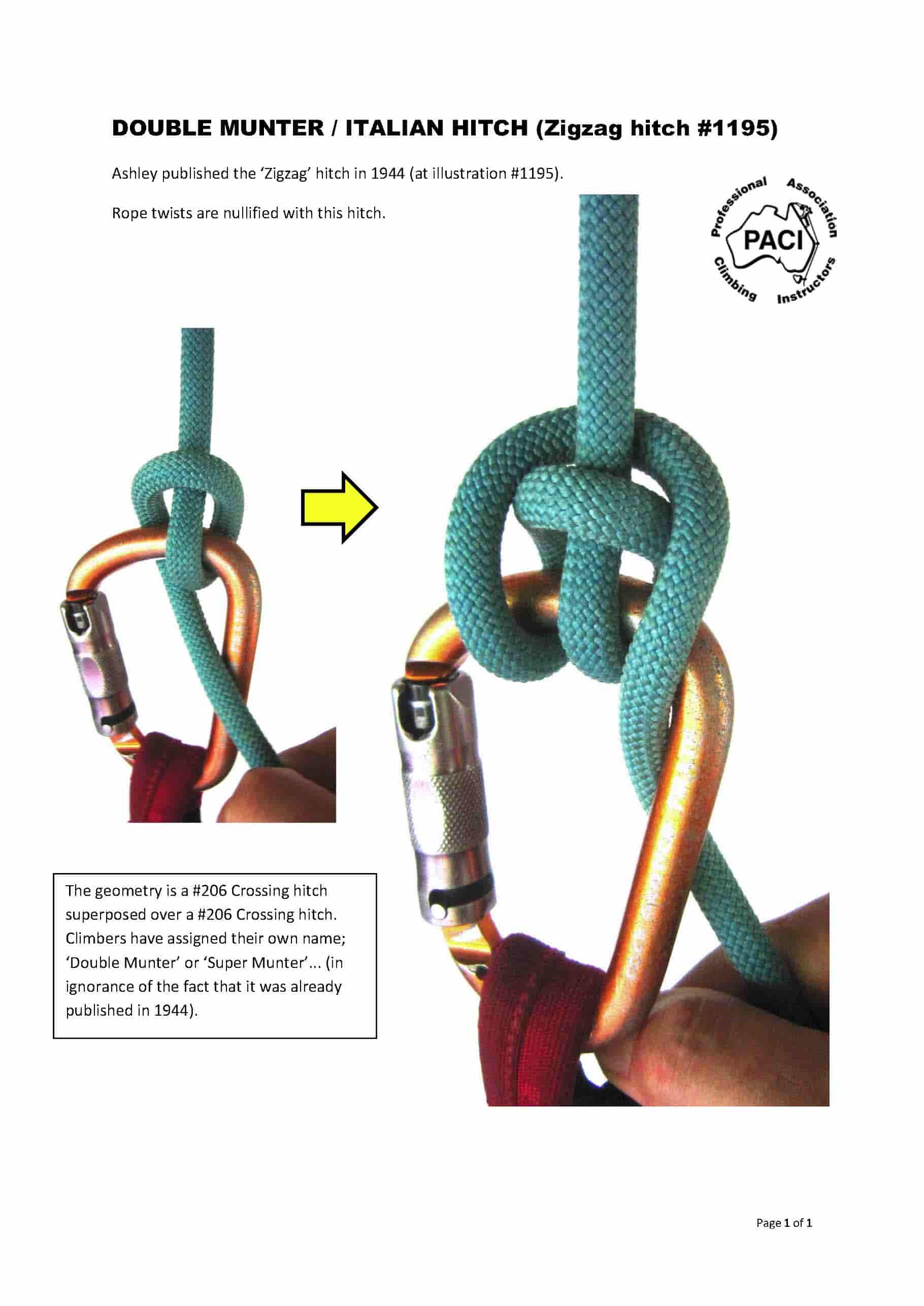
Next I will post an analysis of the values for the Munter
Derek
{kind=link}