In reply to ‘KC’:
Also, please see i have no idea where you got these hostility issues you state from me;
?
I have never - not once - stated anything about "hostility issues". This is a made-up assertion.
What I did state is that there is a [u]risk [/u]that you might perceive a person who disagrees with you
as being some form of hate speech or some form of micro aggression.
The key word here is "risk".
That is, in challenging your world view as to what sine and cosine is runs the risk that you might perceive
that I am engaging in some form of hate speech.
In the 'West', the notional concept of 'hate speech' and 'micro aggressions' has escalated and expanded
in conjunction with 'DEI' policies that run counter to our historical concept of free speech.
There is culture war going in the 'West' - some people actually believe that words can cause 'harm' (although
those who subscribe to this world view don't define [u]how long[/u] the alleged 'harm' affects the alleged 'victim'.
That is; is the 'harm' [u]permanent [/u](ie forever and irreversible), or is it [i]short lived[/i] (eg the perceived harm only lasts for a few hours).
And so obviously I don’t know you personally, and therefore I don’t know what your world view is in relation to the
concept that words can cause ‘harm’. So I tread very carefully.
Also note that there is a wide group of forum visitors from all over the world - and it is more likely than not that
some of them may subscribe to radical ideologies about the concept of ‘harm’ and ‘micro aggressions’.
Its the same issue every time someone posts a challenging viewpoint - ie challenging someone’s world view.
For example, I had been posting theoretical information about what a ‘loop’ is in contrast to a ‘turn’.
And this relates to ‘eye knots’ versus ‘loop knots’.
Some people cling strongly to knotting concepts that were published in 1944 or earlier - and their epistemological
understanding is derived from those historical publications (without necessarily exploring the concepts for themselves).
I believe that the concept of ‘harm’ has been weaponised by some groups of people with a certain ideology.
It is useful to them because they can use allegations of ‘harm’ to shut-down people whom they disagree with.
And so this gives you my background as to why I am cautious, and try to construct my replies carefully.
…
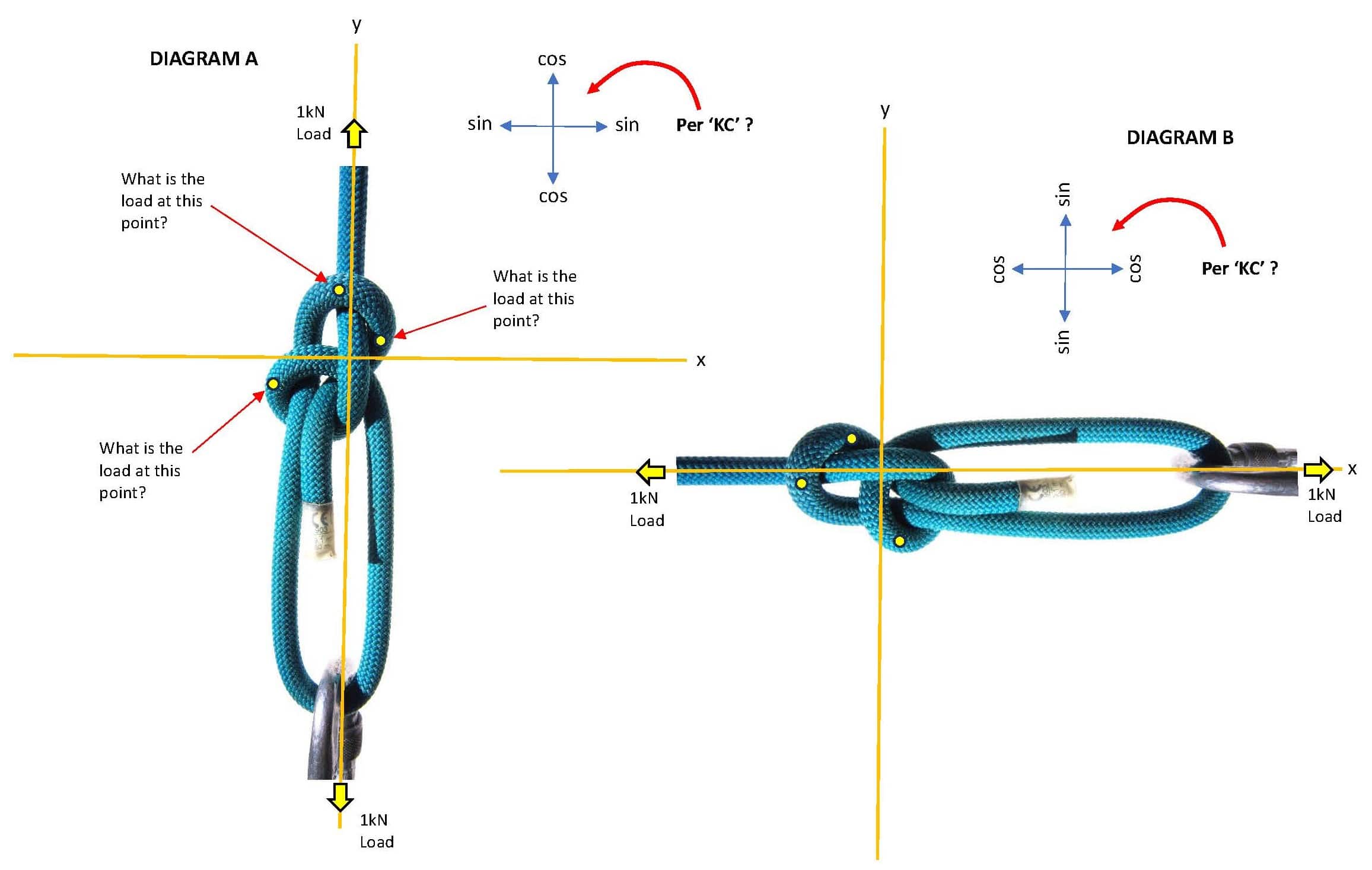
Now, in relation to your world view of what sine and cosine is:
I have a completely different understanding of trig functions compared to your world view.
You appear to define cosine as being some straight line segment within a knot (eg an S.Part).
And you appear to define sine as being some curved segment within a knot.
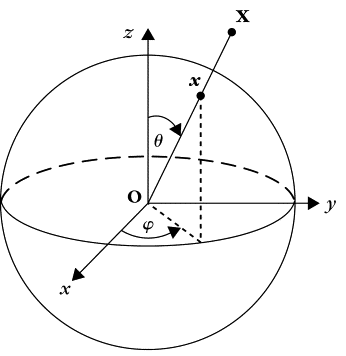
I maintain that sine and cosine can only have meaning within a defined coordinate reference frame.
The sine value is the y-coordinate on the unit circle, and the ‘y axis’ is normally depicted as
the vertical axis. The cosine value is the x-coordinate value on the unit circle and the ‘x axis’ is
normally depicted as being horizontal.
The point being that you need some form of coordinate system.
You can’t arbitrarily label some straight segment within a knot as being ‘sine’ or ‘cosine’.
To do so would make no sense.
I know there are mathematicians who are reading this.
They are remaining silent - and my hypothesis as to why they are remaining silent comes down
to my opening remarks about the concept of ‘harm’. They likely don’t want to hurt your feelings.
My last point - and this is important:
You never apply your world view of trig functions to a standalone knot.
You always appear to use hitches, turns, and various host objects that are integral to the hitch.
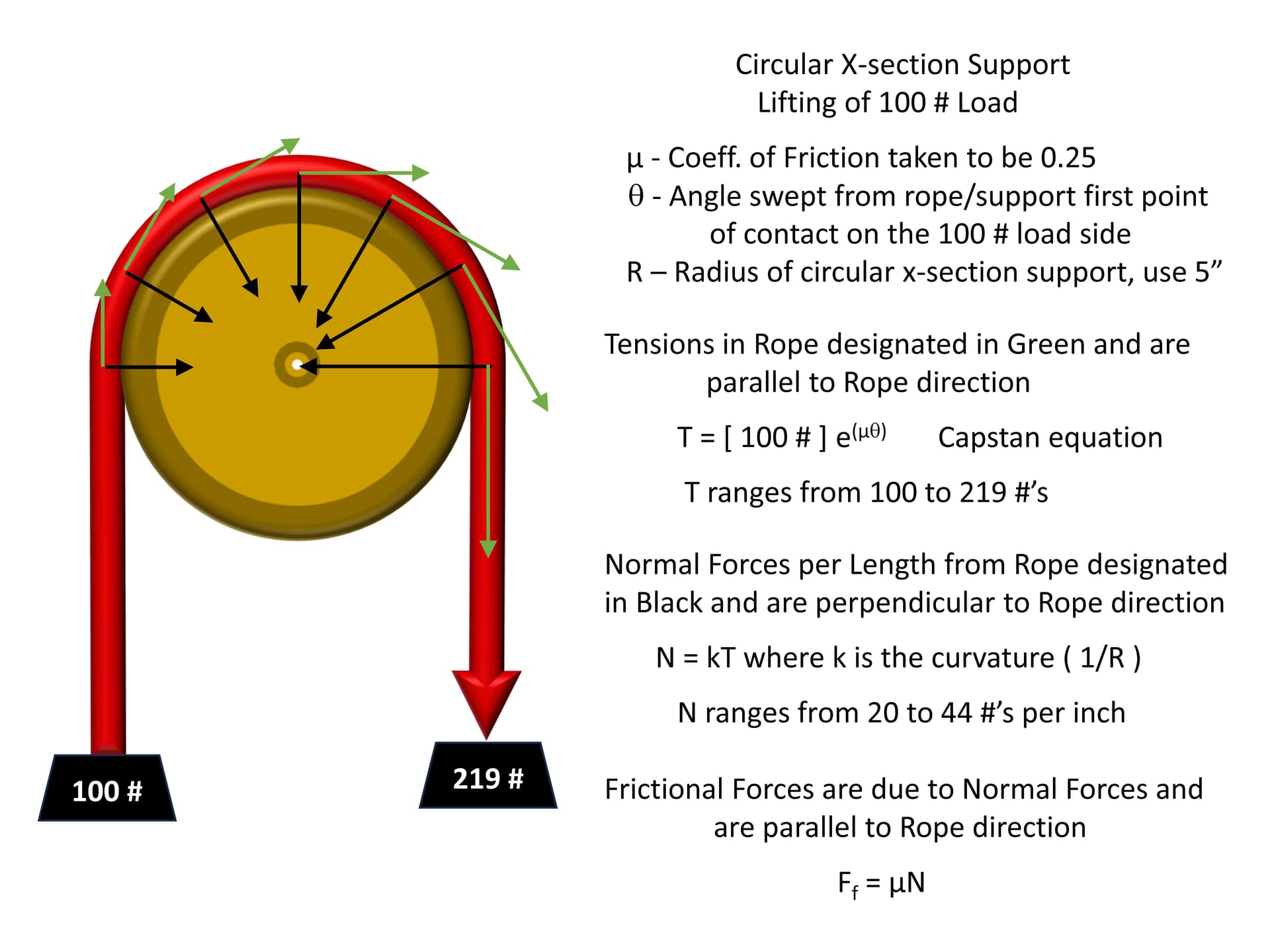
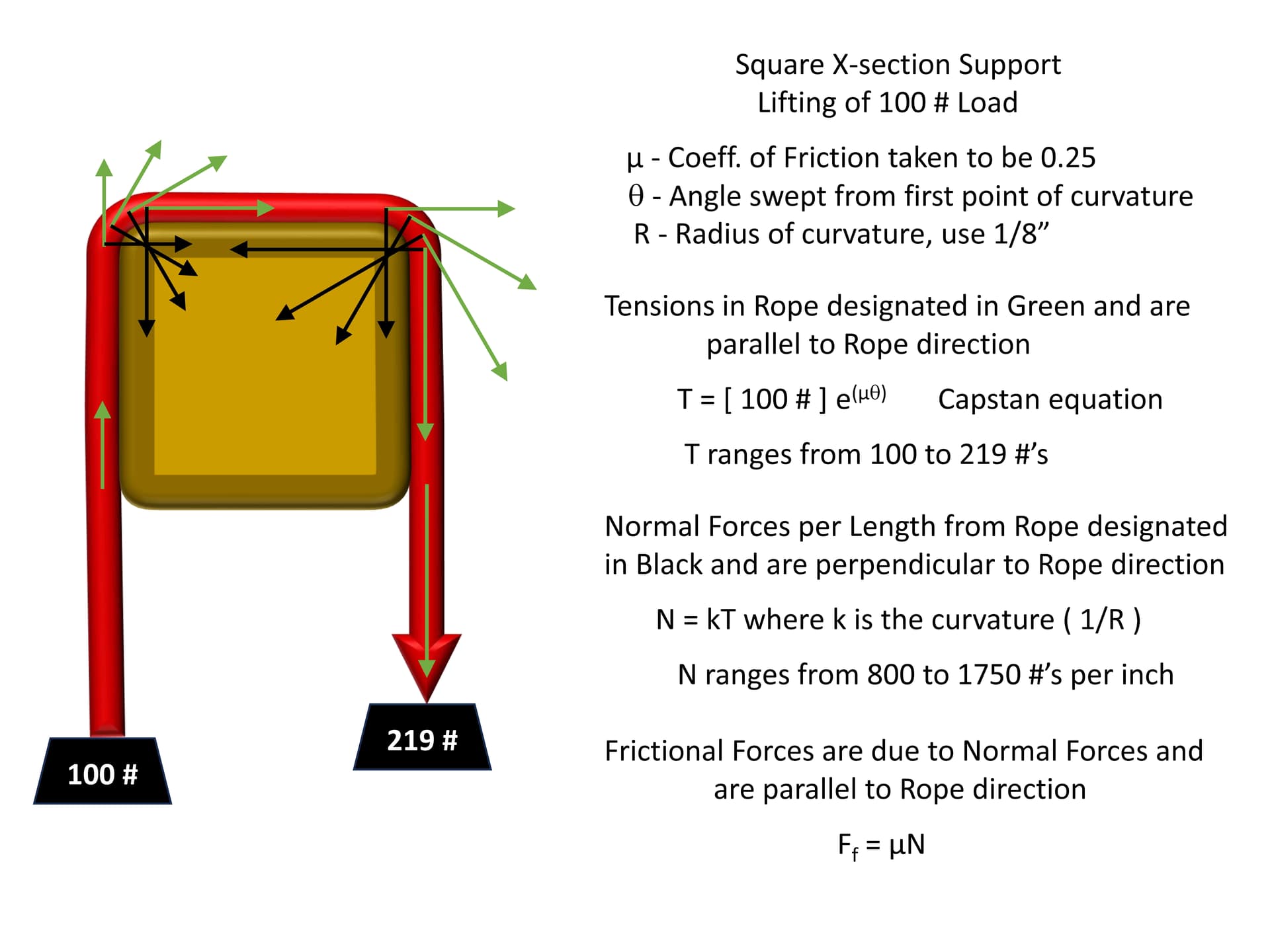
eg; you often use a square profile object and compare this to a round profile object - and provide
various diagrams to show the effect the shape has on a hitch.
You often refer to the ancients, you show sine wave graphs, and you use various anecdotes to formulate and
share your world view of hitches and turns.
But, as stated, you avoid standalone knots - eg a simple Bowline (which is one of the simplest eye knots).
I specifically chose a simple (#1010) Bowline as a knot that you could apply your world view of trig functions
to. However, you have never shown how your trig functions apply to a simple Bowline.
And this leads to a larger question as to how your understanding of trig functions actually applies to standalone knots?
This is a knot forum right?
The purpose of the forum is to share knots, and explore concepts about knots. Its a forum to exchange ideas about knots.
Mathematical concepts posited on this forum ought to be tied to knots - so the reader can understand the concepts as it
applies to real knots and knotting tasks.
And so I am simply asking you to apply your trig functions to something very elementary - a simple Bowline.
But you can’t seem to do that?