Dr. Smith, et al…
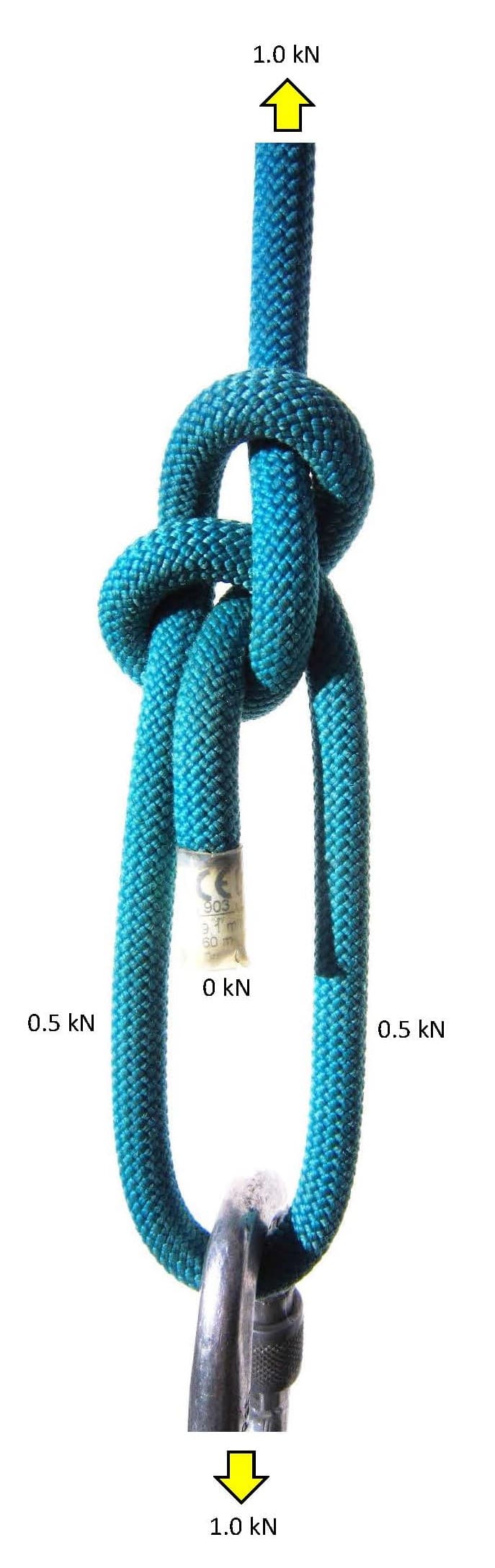
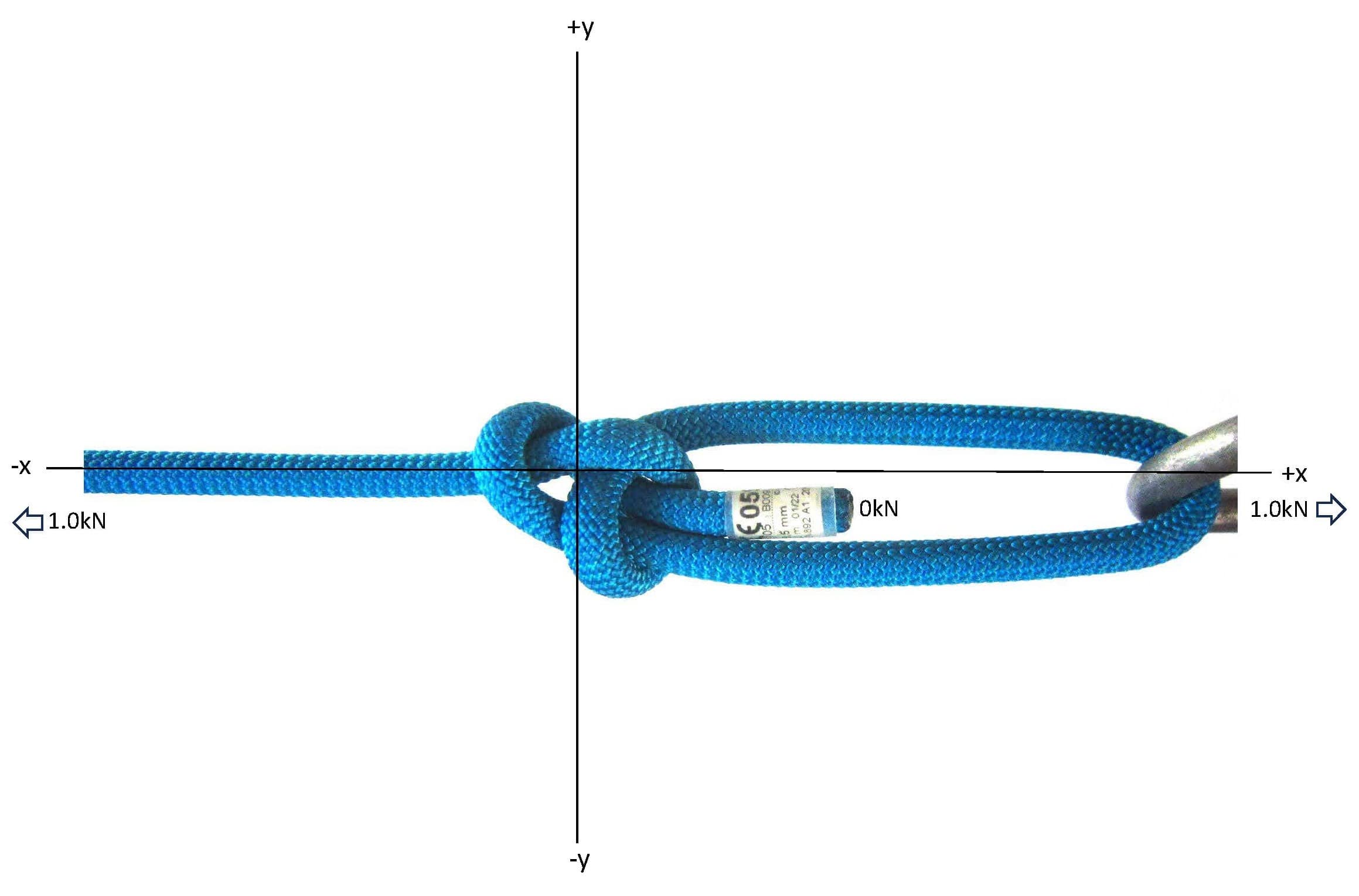
i show this for all knots, ropework; but simplest to start with Hitches and Bends that port linear force thru a SPart/Standing Part into the receiving ‘knot’ microcosm, whether it be termination(Hitch) or continuation (Bend) at the given node swell (from otherwise clean running/flowing rope line).
.
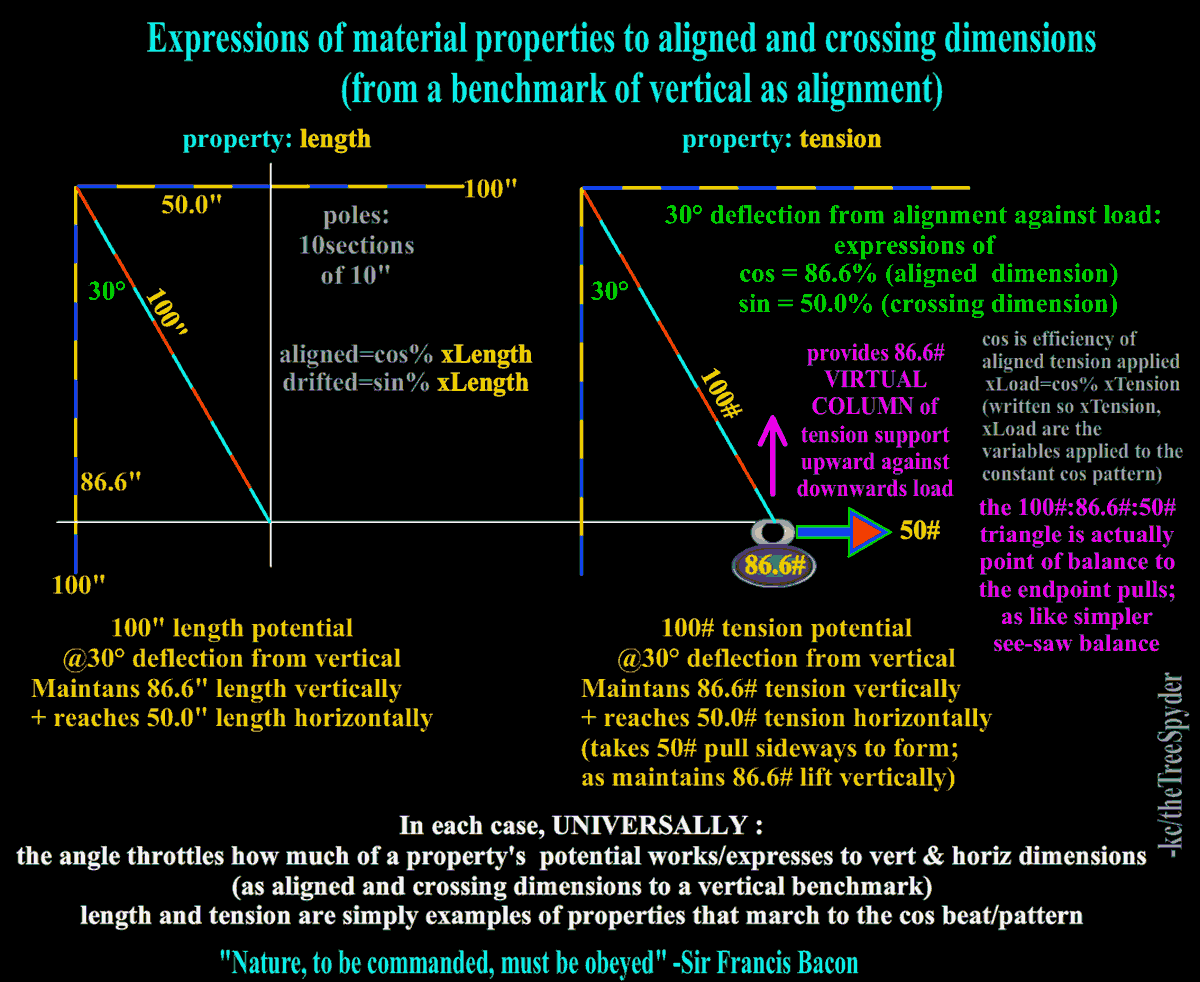
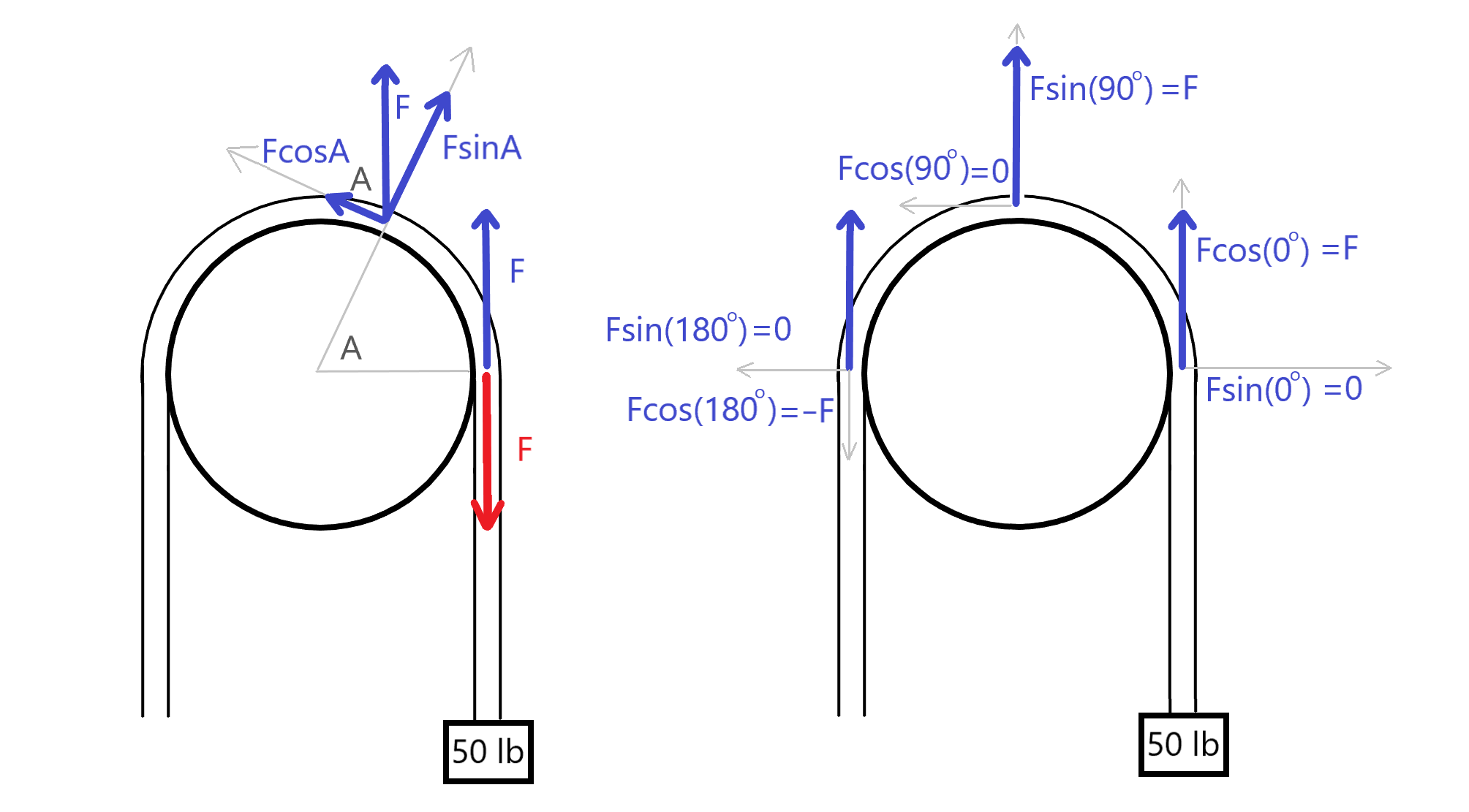
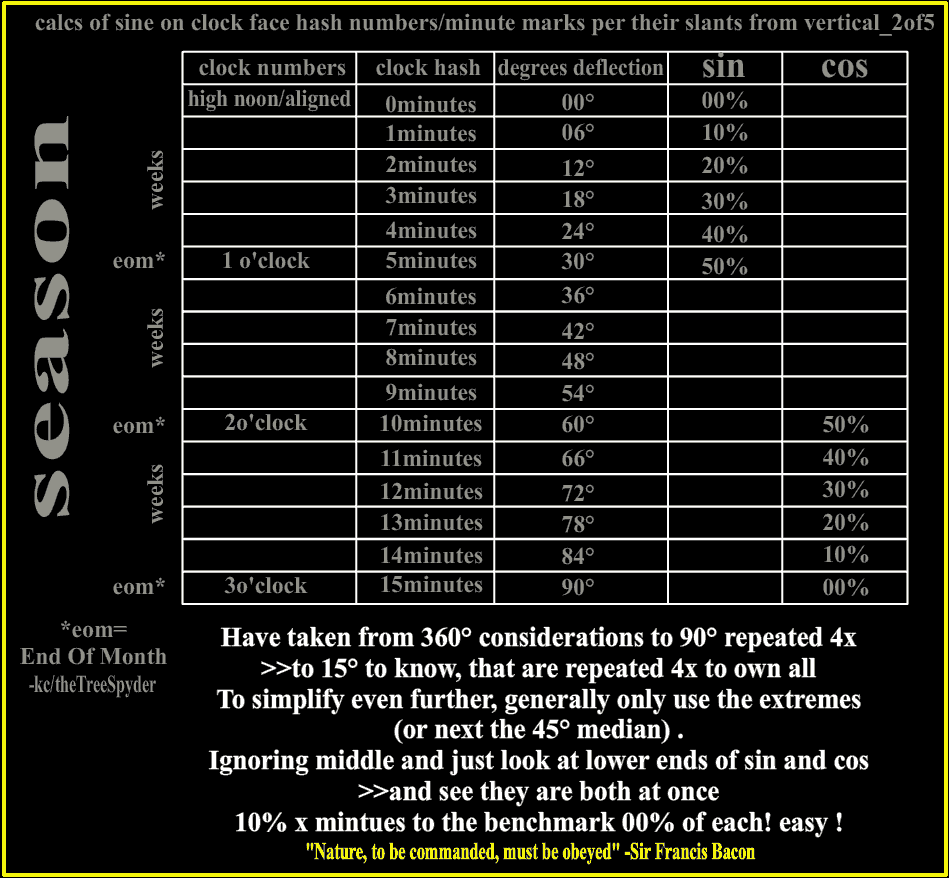
Pure alignment vs. pure 90degree crossing from that benchmark alignment of input force direction are the separate dimensions needed to enumerate by cos:sine patterned %'s ratio. 100%pure cosine is totally devoid of any sine, vice/versa. Anything between these dimensions of pure alignment or 90degree crossing to alignment has some of alignment dimension and some crossing dimension at play, decoded to cos:sine percentages of the available potential to the crossing dimensions of consideration.
.
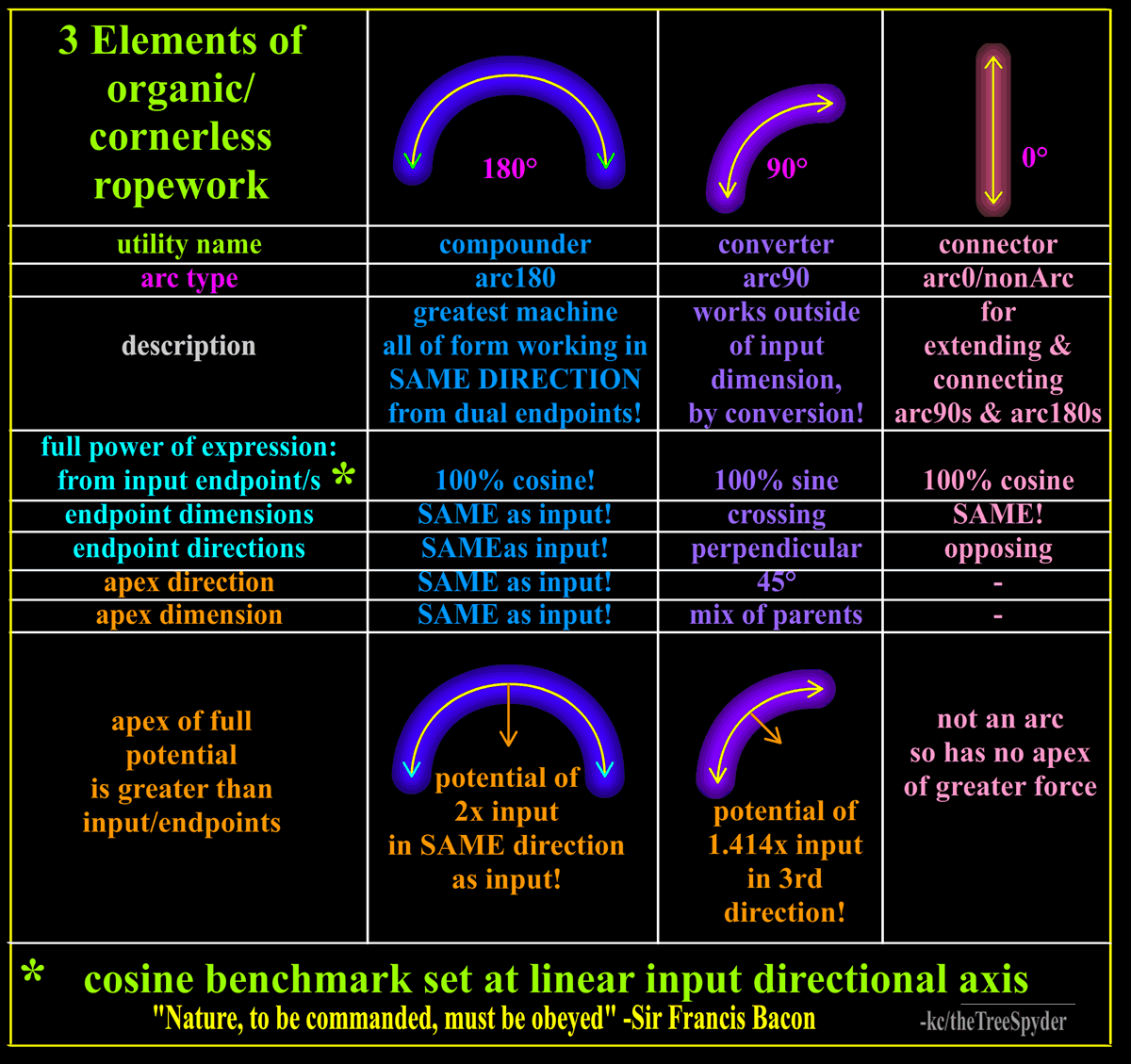
This proposed model/prism of view for 3 organic rope elements uses cosine/sine in real world more dynamically tho than fixed un-dynamically to a horizontal axis statically; as introduced in school sterilely on graph paper.
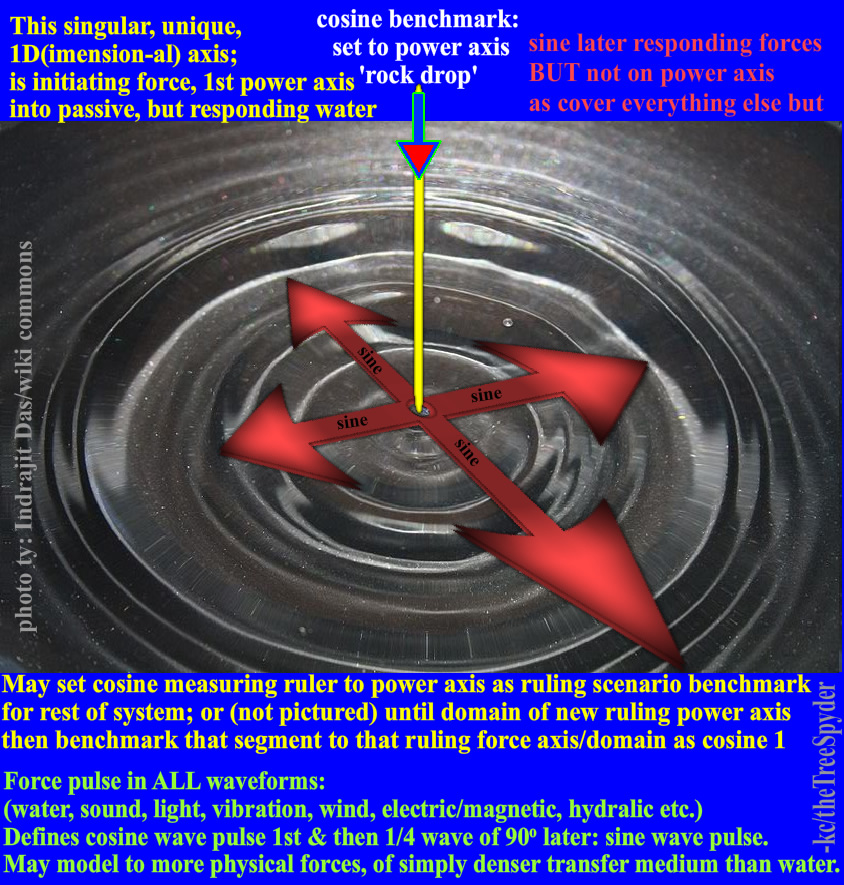
This cosine usage looks at where an aligned bullet should go as sighted(w/o drift) and the recoil together as cosine benchmark of most loaded axis formed by these opposing directions(bullet and recoil paths). Any value from drift of projectile down, up, or to any side is revealed by sine as drift from the original benchmark cosine of most loaded axis.
So dynamically can set cosine benchmark to the projected pure linear (force)path; anyplace/angle that firearm is set to. Firearm does not have to be horizontal to show cosine, as it’s force defines the cosine benchmark if bullet path is what we are tracking etc.
Same could be said of this vertical stone drop to calm waters, to give the resultant sine waves outward from the benchmark cosine linear axis(vertical w/cosine hear) :
The vertical stone drop is the unique benchmark cosine axis, sine/waves as drifts from unique benchmark cosine axis. Full considerations of alignment and deflection(s), as in all things.
.
TY, this is my why to that, and how it fits into this model; as projects forward for workings of triangular or even octagonal stop sign shaped geometries as hosts, and where friction is/isn’t in these models.
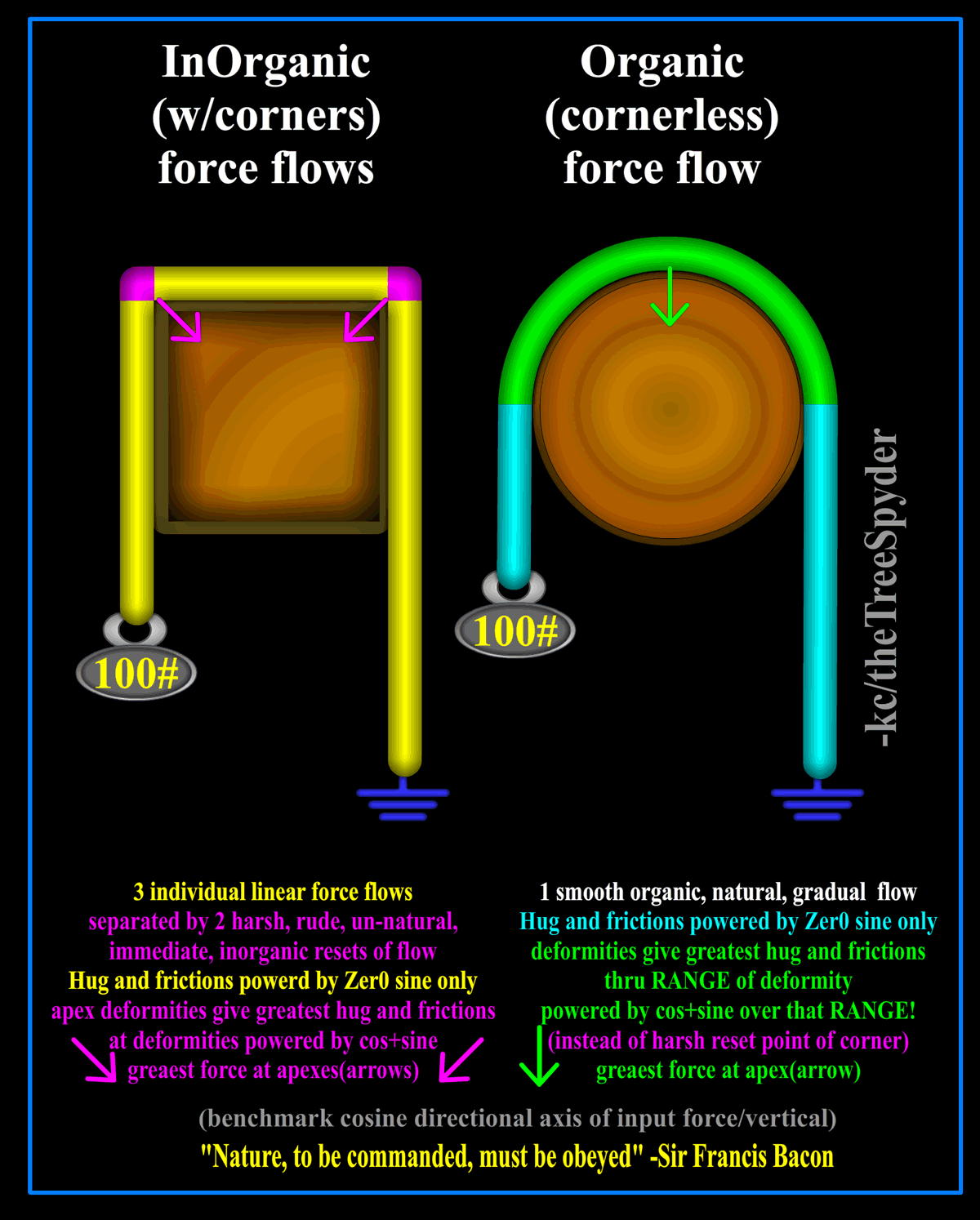
Also, should always view things as focused linear/s(where corner is not travel but rude/sudden/inorganic change) or dispersed/unfocused radial of organic gradual change. Flat rope has thus a focused linear cross-axis of consideration in contrast to round rope’s evenly dispersed non focus; as far as same considerations for same reasons of rope material around linear of radial faced host encompassed.
.
The capstan equation is part of the root of this model for the frictions, as also capstan theory highlights the most evolved arc180 element of building an architecture in rope; just as in stone bridge. Also, it is my contention that the capstan equation w/o the friction value logically leaves the seating value of the rope to round host, This seating value gives hug/grip when operating on both sides of host in opposing directions across; arc180 again superior for the reasons i tried to highlight(only need arc180 on both sides for full effect). It is all the geometry, as like in arc bridge and glass bottle sides etc..
.
For these forces as shown here in rope, are really in all things; and when enumerated to graph show same in gradient fades of light, vibration, wind, electric etc. All are the same patterned graduated rate fade from dimension of full potential to their dimension of non(e) of that same enumerated attribute potential, universally. Rope is just 1 facet to view central works of same gem of how all this stuff works. The receding cosine makes up it’s own factor of economic “Law of Diminishing Marginal Returns” to this predictable path.
.
Things change by rigidly displacing against their non. Occupied space can displace against it’s non of freespace as distance; or against a non of equal/opposite displacer as force. As cosine rises, sine decreases etc.
Rigids may resist in 3 dimensions, and in both tension and compression directions in those dimensions.
Rope, as a flexible device, offers it’s lessons in some ways simpler, in that it only natively resists force along it’s length dimension and then only in the tension direction of that dimension. Thus , fewer considerations to rope, except perhaps counter-intuitive idea that a flexible(rope) can rigidly displace against anything!
.
These rules shown are UNIVERSAL, that miniscule Earth must then inherit even to our humble rope, even all atoms and their electrons. These things are so innate to us, that if the calculations of change for motion, speed, sound, light, shadow etc. do not follow these patterns, they fail as Virtual Reality. The deep, inner, lowest level of brain can tell are out of pattern, and said gatekeeper is not drawn into the ‘immersive’ level that VR can lend. We are so surrounded and saturated with these things as normal base, we cannot just simply see them separately anymore than a fresh mold spore on petri dish can taste the gelatin. The gelatin is just that which is to the mold spore, there is nothing without it to it; it is just that which is. The cos:sin patterned ratio is like that to us i believe; as has no non.
.
Peace.