Quote from: agent_smith on November 01, 2024, 12:10:24 AM
EDIT NOTE:
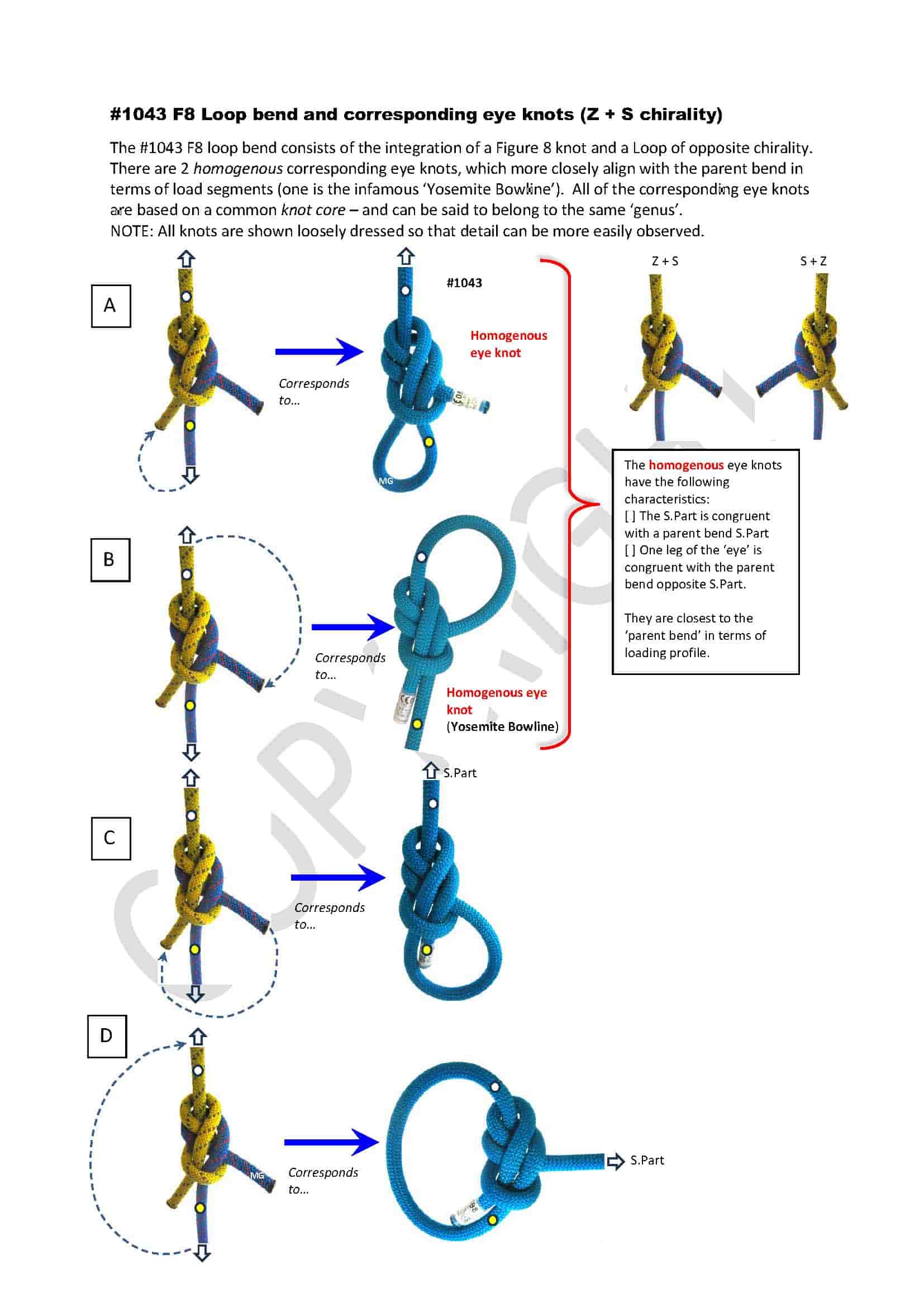
I've added an image showing #1043 and the other corresponding eye knots that have been derived from the 'parent bend'. One of the corresponding eye knots is in fact the infamous 'Yosemite Bowline'.You break a rule of correspondence in this set with the 4th one as it alone has a parent Tail qua S.Part. In Tangle designations, with your yellow rope = "1-2" and the blue rope = "A-B",
You appear to be quoting from your personal correspondence ‘rule’ book?
I didn’t know that any such ‘rules’ existed?
In any case, you are not making any sense.
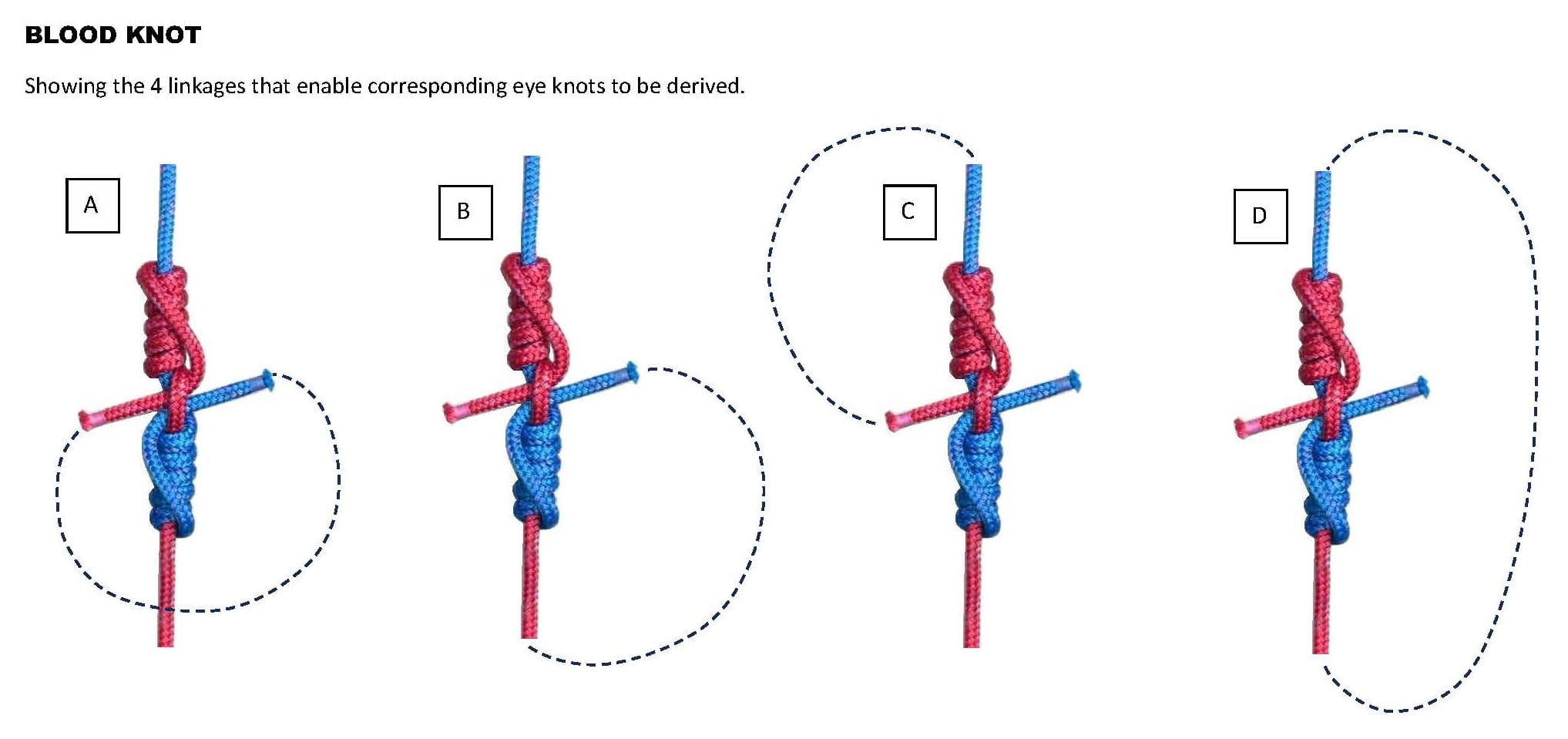
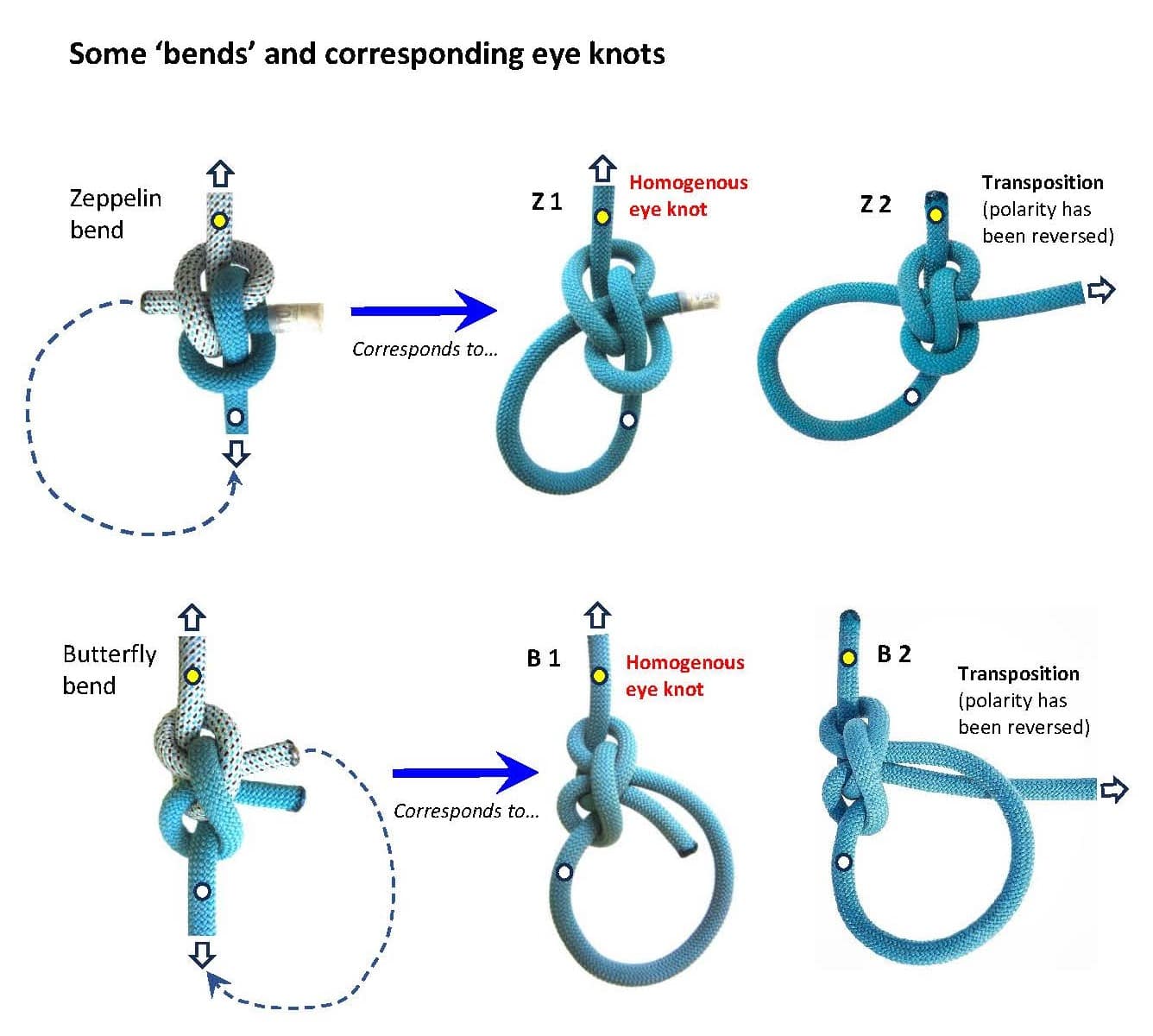
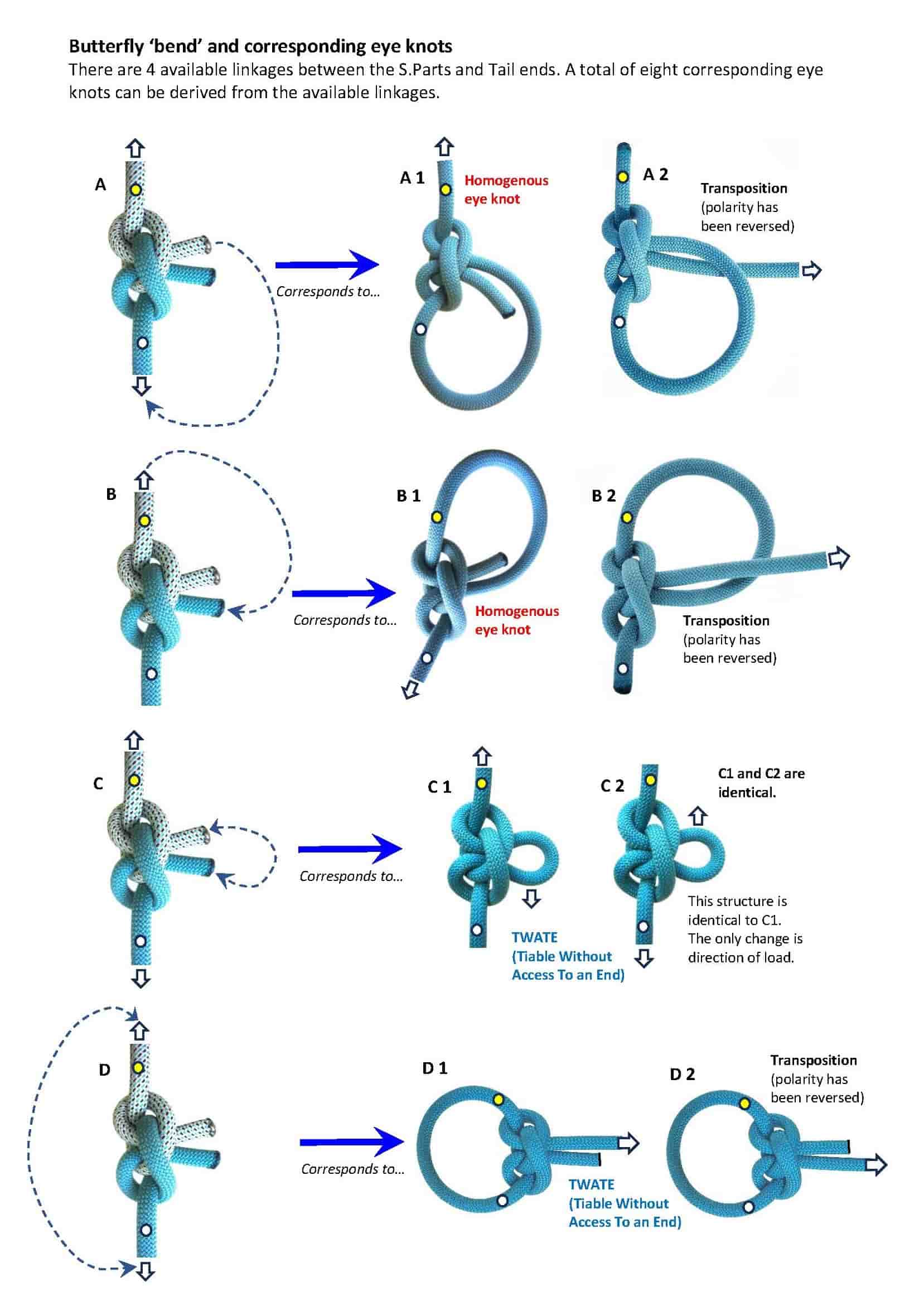
I am simply showing the 4 corresponding ‘eye knots’ which are derived
from the linkages that can be made from the source ‘parent bend’.
Image ‘D’ is simply one of the linkages that can be made.
There is also a transposition that can be made of image ‘D’,
by changing the identities of the S.Part and tail end.
I am only showing 4 ‘eye knots’, I am not also showing a further
4 transpositions.
(Btw, "C" looks dubious of blue-rope/REL->Tail security; I'd put in another tuck of some kind if trying this!)? Deriving and showing the corresponding 'eye knots' has nothing to do with knot stability or viability. You seem to be focussing on something different to me. I am [u]preserving the geometric relationship[/u] between 'parent bend' and its corresponding 'eye knot'. The viability/stability of the derived 'eye knots' is irrelevant for this theoretical exercise.
I had stated previously in other posts that not all of the derived corresponding ‘eye knots’
will be stable/viable.
I would point out that the process of deriving, tying, and then showing the corresponding
‘eye knots’ is interesting because it reveals some emergent properties.
New discoveries can be made.