To Dan Lehman:
There are aspects to this theoretical model which I need to clarify with you:
I think you want to say "two ... will be homogenous" --how otherwise?In a general sense, I cant say with certainty that there will always be 2 homogenous derived 'eye knots'. It is not always the case, that 2 'eye knots' will be homogenous.
And also "SOME derived ... might not be stable" --but sometimes all ARE. (And "unviable" => "viable"; or "(some might be unviable)" ?! )And here we are examining English grammar. It is true and factual to state that some derived 'eye knots' may be unstable. In other words, there is no guarantee that all derived 'eye knots' will be stable. Indeed, some may be unstable.
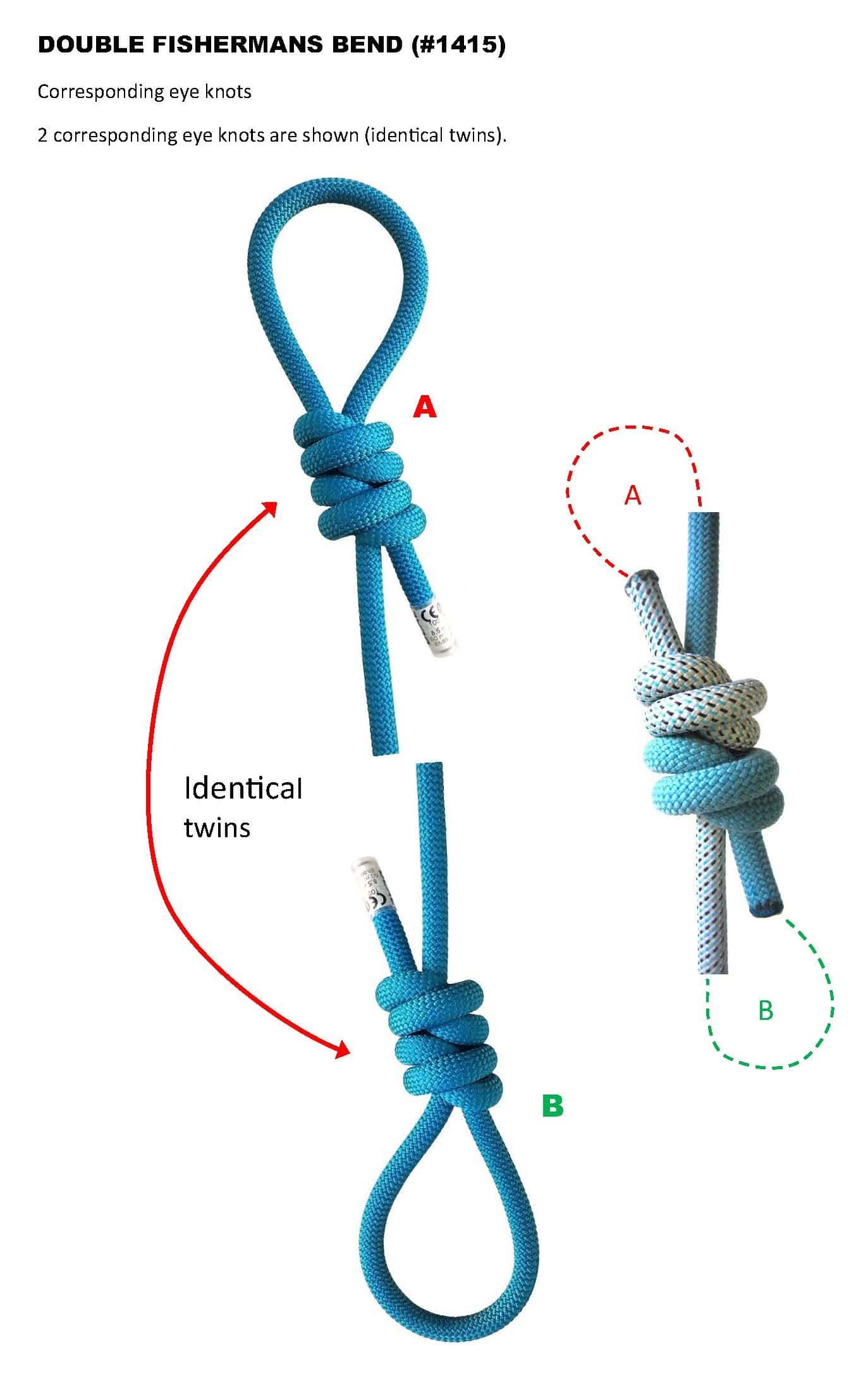
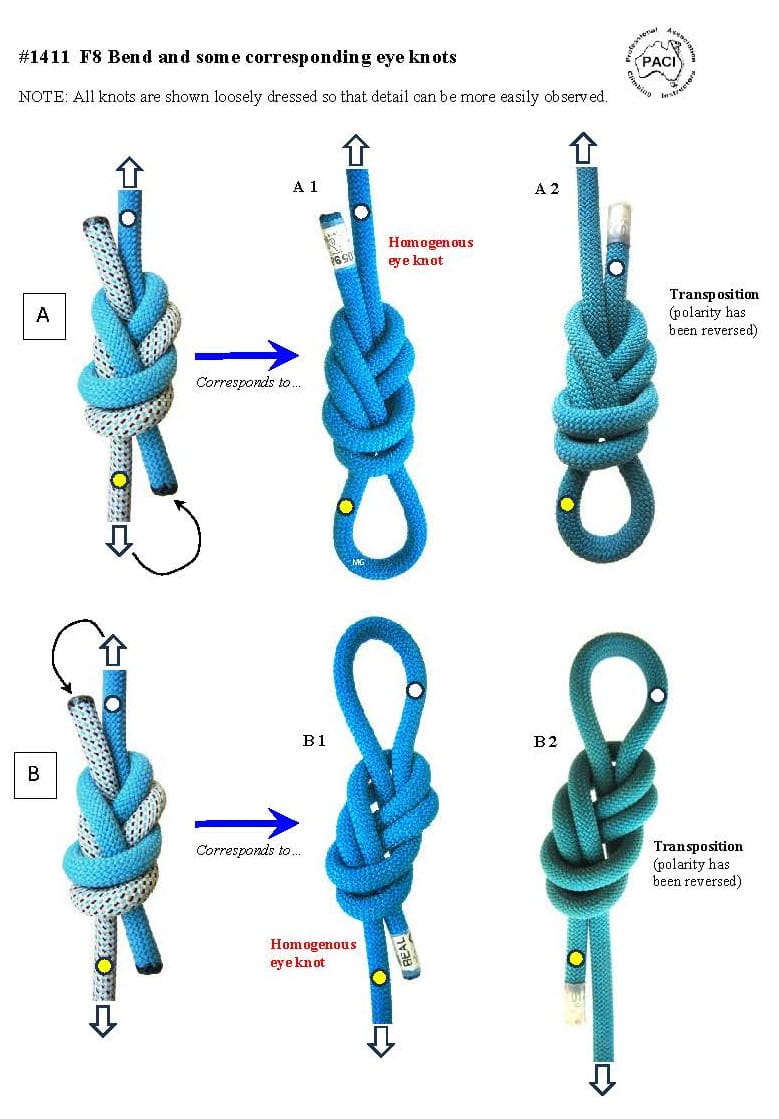
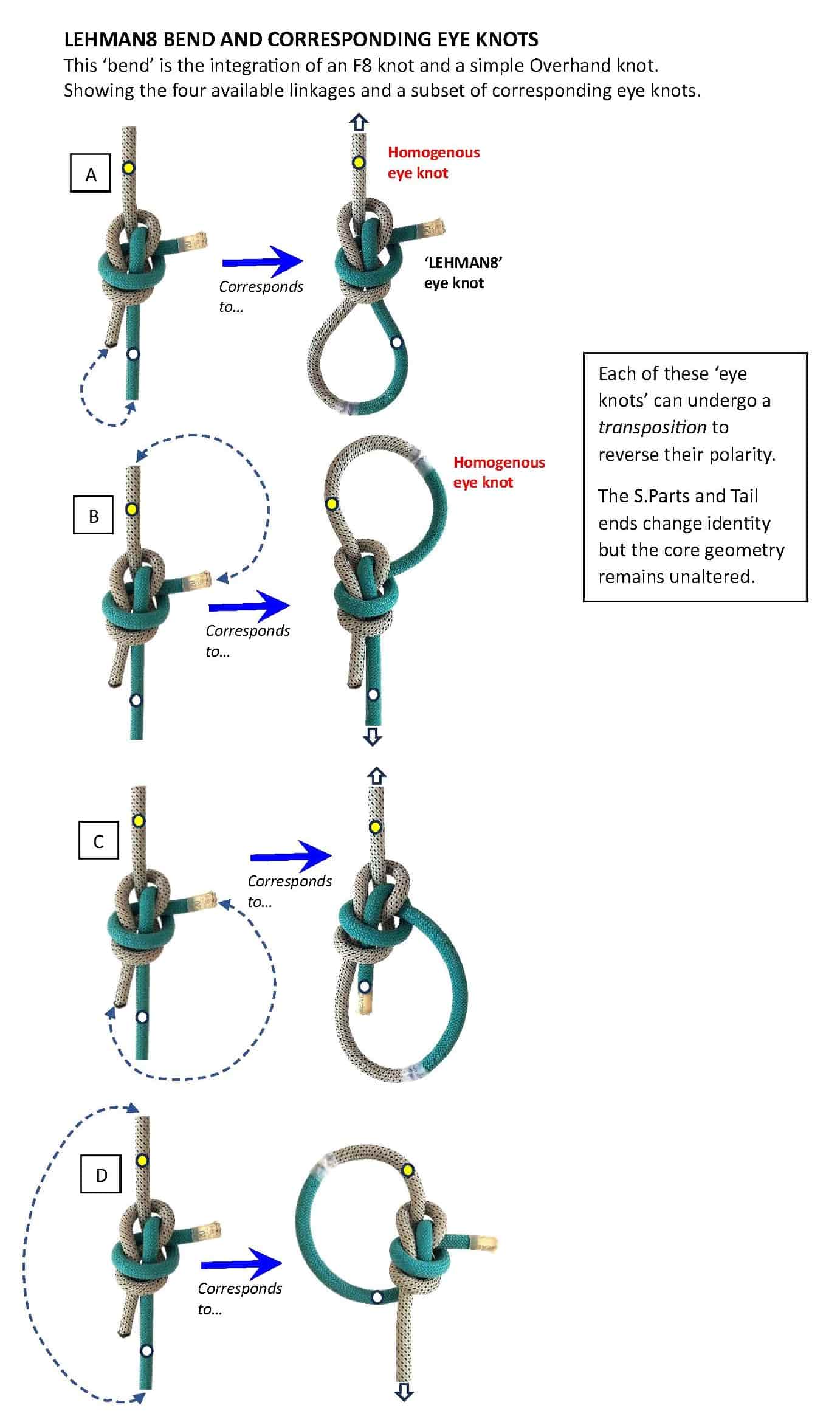
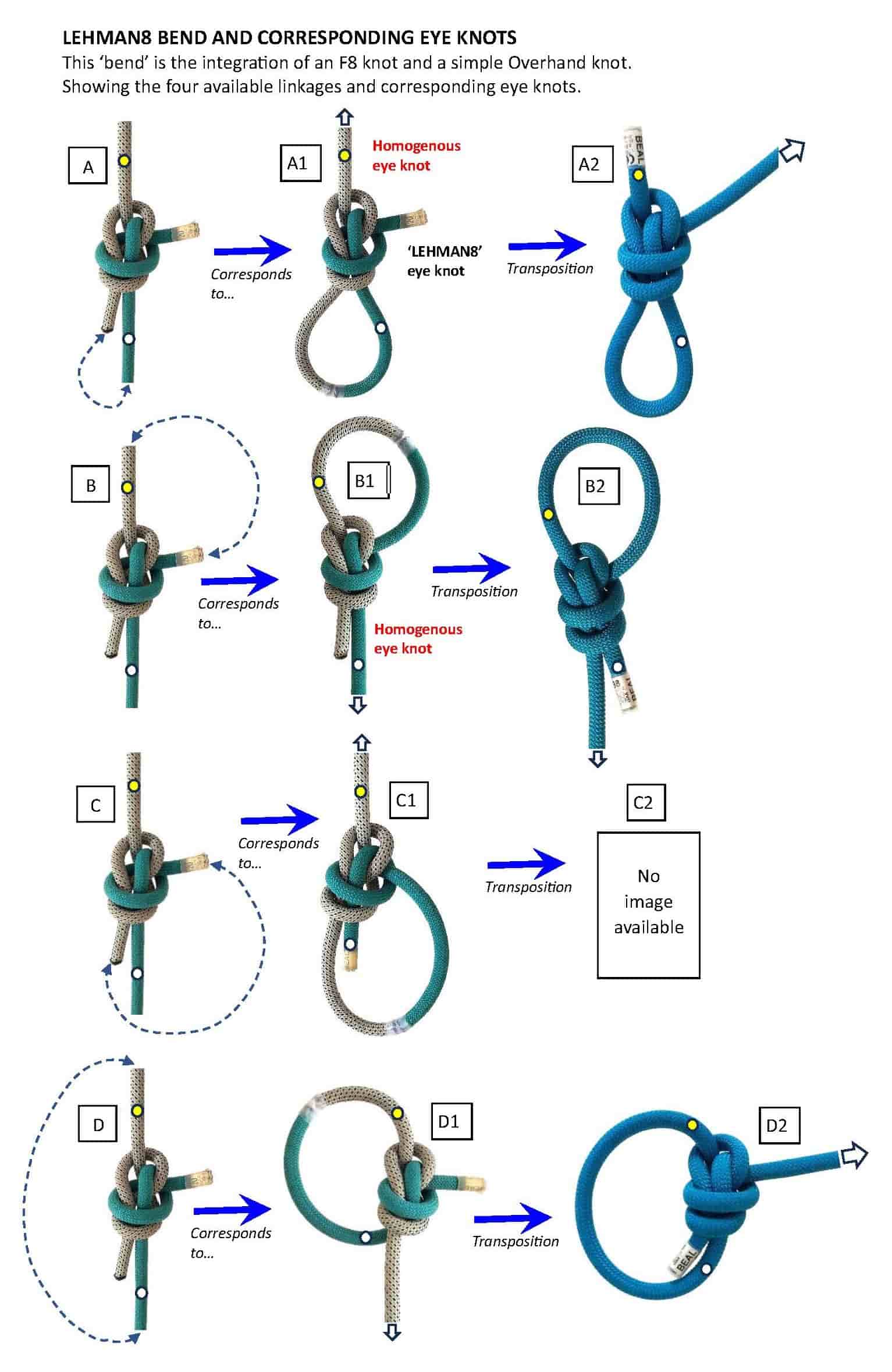
And these will of course also be what you're calling "identical twins" --that is the tangle instantiated with a connection of eye legs but otherwise awaiting the completion of the loading profile.NO. The 'geometric pairings' are not necessarily identical twins. Please refer to the attached images for my position on this. Note that the [i]identical twins[/i] 'eye knots' occur with #1415 Double Fishermans bend. With #1411 F8 bend, there are no identical twins.
The ‘geometric pairings’ is simply my placeholder description for the 2 ‘eye knots’ that are derived from a linkage.
For each geometric pair, one is the transposition of the other.
I reserve the term ‘identical twins’ for ‘eye knots’ that are 100% identical in every aspect.
This includes S.Parts and Tail ends being congruent with each other.
Speaking this way makes it all sound too much like a tangle-by-tangle investigation, rather than --what it IS-- stating the logically obvious.Hmmm, given the back and forth arguments with me largely repeating the same things but in different words, having clear and unambiguous definitions seem to be what you prefer. You engage in debate based on construction of the the English language (language is important). I prefer tight definitions (eg defining what a 'Bowline' is).
I advanced the term ‘homogenous’ to identify those derived ‘eye knots’ that align closely with the parent bend.
And are geometric identical twins --or why not?I distinguish between a [i]geometric pair[/i] and [i]identical twins[/i]. There is a difference. Identical twins 'Eye knots' must be identical in every aspect (including S.Part and Tail end). Refer to the attached images: Note that #1415 Double Fishermans produces a set of identical twins 'eye knots'. And yet, #1411 F8 Bend does not (no identical twins). Both 'bends' are symmetric (they are not asymmetric). Why is this so? I'm going back and examining other symmetric bends - to see where and why identical twins occur... [u]Hypothesis:[/u] I posit that [i]identical twins[/i] 'eye knots' can only occur from parent bends that are [u]symmetric[/u]. I don't think it can occur with [i]asymmetric [/i]bends. What are your thoughts?
…
I still see no reason to work from a Joint to other knots (currently just EKs),Well this is the basis of my theoretical analysis - and the title of my work. I am exploring the relationship between 'Bends' and corresponding 'eye knots'. For me, it is a logical way of exploring relationships between certain classes of knots.
We’ve been down this path several time before - and I pointed out that there is nothing
to stop you from exploring other relationships (eg start with an ‘Eye knot’ instead of a ‘Bend’).
AND to what purpose do we seek to put some formal system as these? I'm thinking that it will help A BIT in cataloguing knots, but believe that it is not an assured determination of that, alas.The [i]purpose [/i]is the seeking of knowledge and understanding. I have never claimed that my theoretical work will solve all knot riddles and mysteries. Harry Asher made a start a long time ago - but stopped short of diving deep into the underlying theory.
I noticed that no one had really made a substantial effort to explore this subject area.
Not even the great Xarax went into any great technical detail.
(He knew about it and had made several comments in various posts, but he never fully
evolved a theoretical model).
EDIT NOTE:
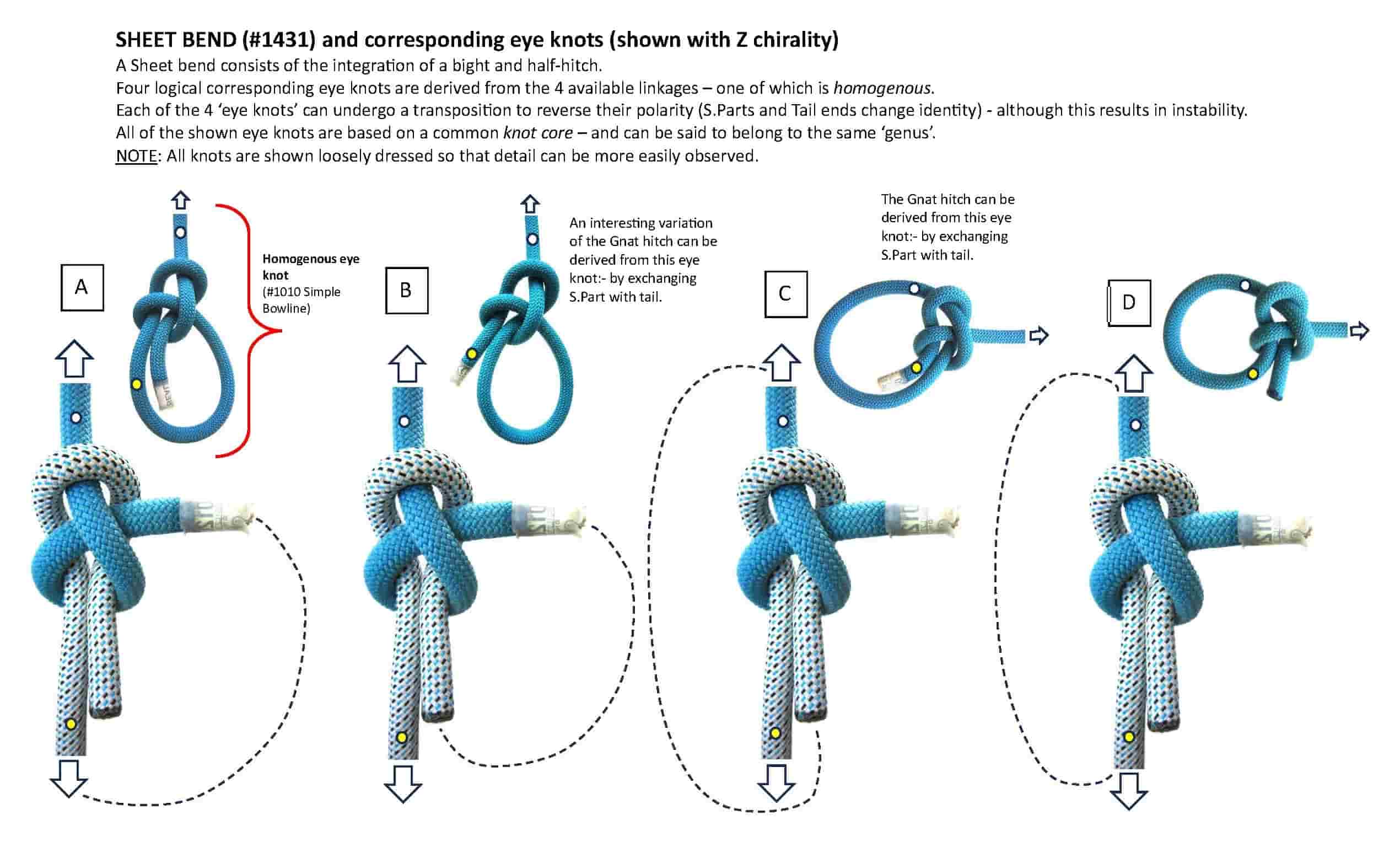
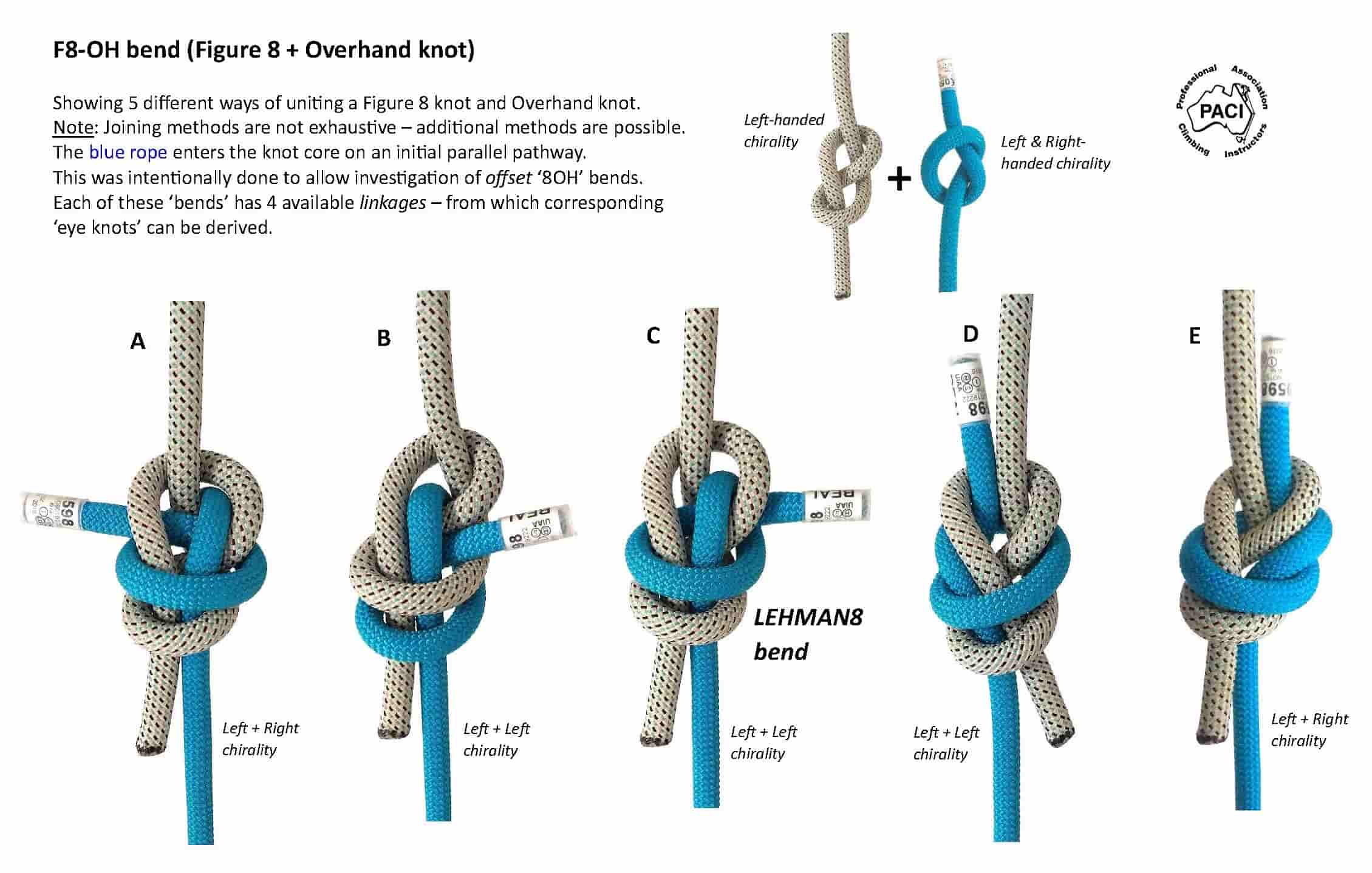
You will note that I had abandoned the notional concept of 4 corresponding ‘eye knots’,
instead - stating that for each available linkage, there is a geometric pair.
This gives rise to a total of 8 possible derived ‘eye knots’ from a given parent bend.
Your arguments made me realise that it was hard to write down a theory to support
my preference for 4 ‘eye knots’ in relation to 4 linkages.
To be perfectly honest, it is hard for the lay person to grasp that there are 8 possible combinations
of ‘eye knots’. It is easier to simply say “there are 4 derived ‘eye knots’ corresponding to the 4
available linkages”.
It gets complicated to talk about all of the possible combinations.
Furthermore, some of these derived ‘eye knots’ are illogical - from the point of view
of loading profile and stability.
I evolved the theory of the transposition to help explain how there are 8 possible combinations
of corresponding ‘eye knots’.
Dan - I note that you like to sit back and let me do all the ‘hard yards’ of developing the theory,
by barking at appropriate moments. You don’t seem to offer up your own theory or help to improve my theory?
I do all the hard work producing high quality photo images - you provide exactly zero images.
And yet, I plod onwards like a good soldier putting up the good fight.
It would be nice to see you advance some theories!