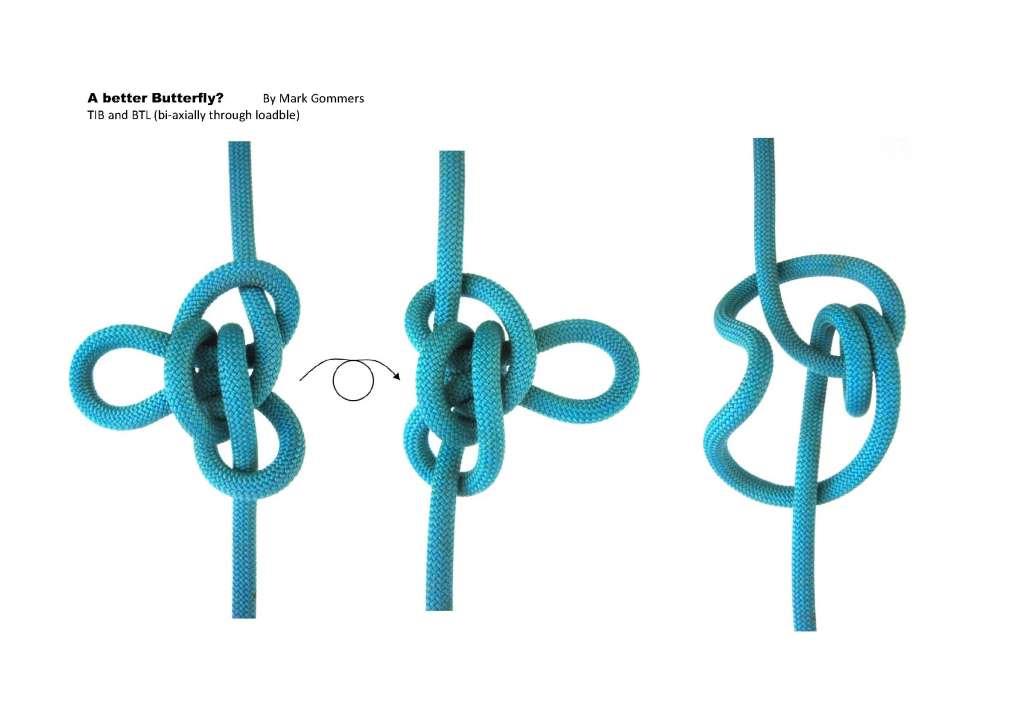
Here is, another midline eyeknot, which appears that it can be loaded from Spart to Spart (through loaded). Note, in third image, how the two links embrace one other, subserving this bi-axial loading without jamming incidents, yielding to a stable and secure construction.
The eye loading profile appears to be immune to jamming too.
I have a TIB tying method, which will follow later, but any suggestions are welcome.
This is a very simple inline eyeknot. It is constructed by forming a flipped Z loop, passing then the right line in between the loop, setting the size of the bight at the same time, as the final eye (first image).
The next step is to pass the bight through the loop, over its continuation line (second image).
Loading the knot from all three directions, induces no observable distortion, or jamming.
The collar, is very easy to bend, athough it is part of an overhand based complex link.
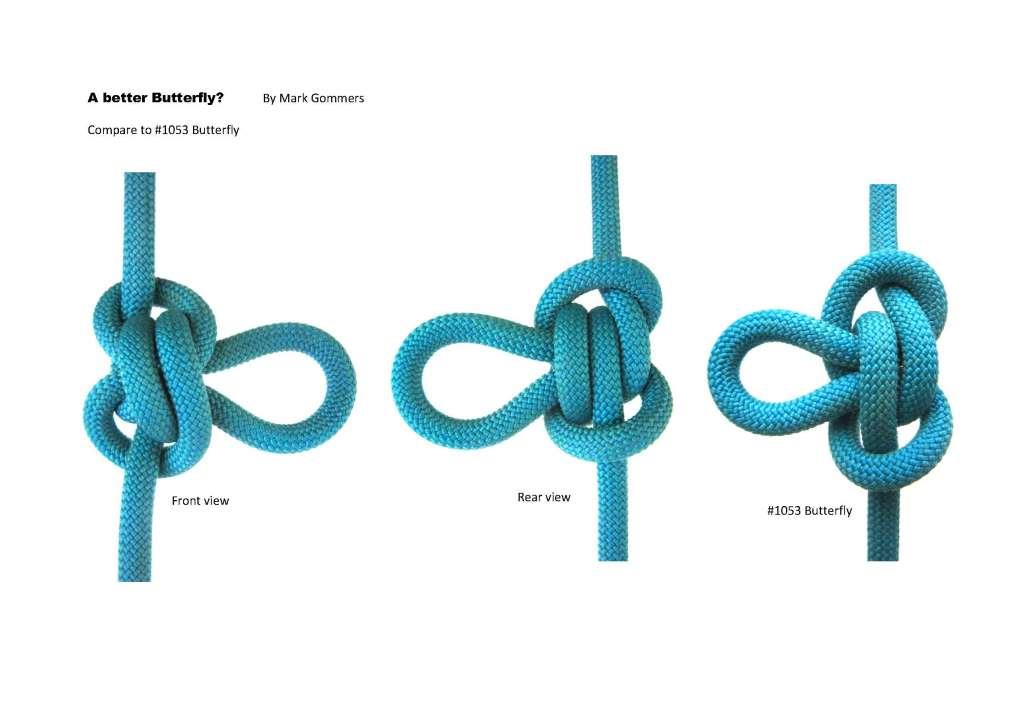
i haven’t found a reference yet for this seemingly stable design structure, but it’s too soon for claims of originality.
Interesting presentation at reply #21.
Thanks for your continuing efforts.
However, I am of the view that it may distort under heavy load.
I like the ‘right’ side of the structure - the eye leg executes a more gentle turn around 2 rope diameters.
The ‘left’ side is a different matter - the eye leg executes a sharp turn around only 1 rope diameter.
The ‘under’ - ‘over’ (opposing) nature of the ‘collars’ tends to contribute to distortion under heavy loading.
If there was a way to improve the ‘left’ side - that would be interesting.
I also wonder if it is possible to create the ultimate BTL (Bi-axially Through Loadable) mid-line eye knot that is also TIB?
Imagine a structure that is based on a Zeppelin-like core?
Challenge accepted?
However, I am of the view that it may distort under heavy load.
I guess you are refering to BTL profile, but you have to dress it smartly, by gradually cinching all three endings, in order to cease nub distortion and hasten the balance state. I believe the TL profile(“tugboat loadings”, SPart 1 = > eye, SPart 2 = > eye), barely leave a tortured nub.
I think of the harness 1050, as a super basic inline structure, and am trying to build on its core to produce more stable results. However, whatever transformation i subjected to the previously presented inline configuration, i was not able to pick up any correlation with some known knot (some inline knots are harness derivatives), but with a Xarax Samisen bowline.
What we can do, is try to approximate this supposed " pseudo symmetry", in order to keep the distortion to a bare minimum level.
Of great importance, would also be the validity of EEL (either end loadable), CL or RL (cross loadable or ring loadable) qualities, with the feasibility of a solid EL (eye loadable) , BTL (bi-axially through loadable) profiles that correspond to a midline knot accordingly.
Having said that, i only know so far just two knots which somehow come close to such an optimal response when loaded, the 1053 butterfly and the cask knot (EHL).
I also wonder if it is possible to create the ultimate BTL (Bi-axially Through Loadable) mid-line eye knot that is also TIB?
Imagine a structure that is based on a Zeppelin-like core?
Challenge accepted?
This is a tough challenge, but i wouldn’t bet against the existence of such a knot structure! Maybe, our minds are not prepared for it yet!!
Recently I have had a quick test on tsik_lestat’s Simple line and Xarax’s Re-harnessed Harness
loop, both of them jam, for tsik_lestat loop one side has a twist collar Angler’s loop,
and Xarax’s loop has overhand knot.
My loop here is compact and stable. On the white standing part side don’t have overhand knot,
but it acts like overhand knot and it’s jam too. 謝謝 alanleeknots.
Hi Alan, many thanks for your midline offering, as well as for the TIB tying method. It appears to be a very strong inline knot, certainly more stable than mine, and i wonder how i 've missed it (i shall explain later on).
What’s going on with the inlines jamming? I thought (hoped) that my angler’s component collar would survive.
I do have a proposition for Xarax’s reharnessed harness, which overrides the overhand, maybe for an upcoming thread, where i could organize most of harness derivatives.
Now, performing some TIB transformation maneuvers, including some consecutive collar flips at your structure, i have arrived at an equivalent bowline topology i had tied in the past.
I believe, it was its midline variation, that was presented here…
Have a few tests on these two loops here, looking good to me,
will do more test then I can tell you.
How to tie Midline Loop (B) please see this link. https://www.youtube.com/watch?v=GxS6_NT0lac 謝謝 alanleeknots.
Thanks for this variation, it certainly looks original to me, i guess it remains to be seen!
Although its topology, as well as its tying method, denotes the knot of origin, i can confirm this correlation through transformation, where your inline offering, can be simplified to take the final conventional butterfly form.
You have chosen to enhance butterfly’s core by adding some extra coils to one of its links, rather than retucking to add some extra collars.
I like the tidy, smart, dressing with the parallel lines within the nub. In my view, stability wouldn’t be a problem, as i consider this structure as super stable, but it’s left to be seen, if this nub interference, whilst it does not considerably appear to disturb butterfly’s pseudo symmetry characteristics, does affect the jam resistance of the various profile loadings.
I suppose Alan would give it a go to find out.
@Alan Lee
Have a few tests on these two loops here, looking good to me,
will do more test then I can tell you.
I should really hope you do, because Midline A’s jamming profile had concerned me too.
Thanks Derek, speaking of polyaxial structures, i have this configuration, which i’m not sure if it has been recorded before.
In my view, this is an inline variation of the bowline on a bight, which is super easy to tie with a bight., while it can be loaded from all four directions, or in various loading combinations.
I am trying to figure out which is the best loading profile, which, IMO, should rather involve at least primary eye loading, or rightmost SPart loading (first image) for a more stable knot response.
It requires good cinching (as all knots) to function properly. The secondary eye might be shrinked.
I wonder if there is a practical aspect at this knot.
The corresponding Eskimo bowline on a bight, tied as previously, also features a decent way of tying in the middle of the rope, with a super easy “with a bight”, TIB tying method as well.
The SParts are now exiting the nub in axial alignment, an ideal topology for a good BTL profile.
The structure appears that it can be loaded from all four endings, or in various loading combinations.
This structure isn’t ‘BTL’ (bi-axially through loadable).
However, it is TIB (very nice).
In a BTL loading profile, it is unstable.
Also, in the purported BTL profile, it isn’t a Bowline (no nipping loop).
However, as a soft shackle (loading from eye-to-eye), it does have a nipping loop and is stable.
In my view, if this was presented as a soft shackle, it is deserving of the title of a type of ‘Bowline’.
It is unfortunate that it isn’t BTL (as proposed in your image notation) - if it was, this would have been quite remarkable.
EDIT NOTE:
If you shrink what you have labelled the ‘secondary eye’ - it then becomes a BTL eye knot.
But, in doing so, I think you lose any purported advantages - and does not compete with #1053 Butterfly.
This structure is ‘BTL’ (bi-axially through loadable) - so that’s nice
It is also TIB (again, very nice).
Structurally, it is analogous to #1431 Sheet bend (not an ‘Eskimo / anti Bowline’).
In terms of eye loading, only one of eyes can be loaded in both axial directions (with respect to an SPart).
I’ll refer to this particular eye as the secondary eye (which structurally functions as a ‘tail’).
The primary eye is not loadable in both axial directions…however it appears to stable when loadable in one axial direction only.
…
Having made these comments in good faith, this presentation is very interesting - and I think you are on to something here.
It would be good if more work can be done to improve eye loading stability (in both axial directions).
I am also of the view that it isn’t deserving of the title ‘Eskimo Bowline’ - which in fact suggests an ‘anti’ type of ‘Bowline’.
As stated, it is structurally similar to a #1431 Sheet bend.
Edit note:
I hope there is a way to boost eye loading stability - without sacrificing simplicity (and TIB status)!
Given the status of this thread within ‘Knotting concepts and explorations’ category - I thought it might be worth exploring these concepts a step further.
All given in good faith and with respectful language…
A bend is a single or monoaxial structure - the force line has a single axis.
And one could also state that a 'bend' is an [i]end-to-end joining knot[/i] where both SParts are in axial alignment and 180 degrees opposed.
If an Alpine Butterfly loop is tied such as to excuse a portion of the cord, then it is effectively a bend and therefore also a monoaxial structure.
Although in reality, the [i]eye [/i]of a #1053 Butterfly still remains (it exists) - when the Butterfly is subjected to a BTL loading profile (bi-axially through loaded) - the eye is isolated from load.
In order to re-classify as a 'bend' - there must (by definition) be a [i]unification of 2 ends[/i].
Since #1053 Butterfly does not have a unification of 2 ends, it remains an eye knot (not a 'bend').
However, there is a correspondence between a 'bend' and an eye knot.
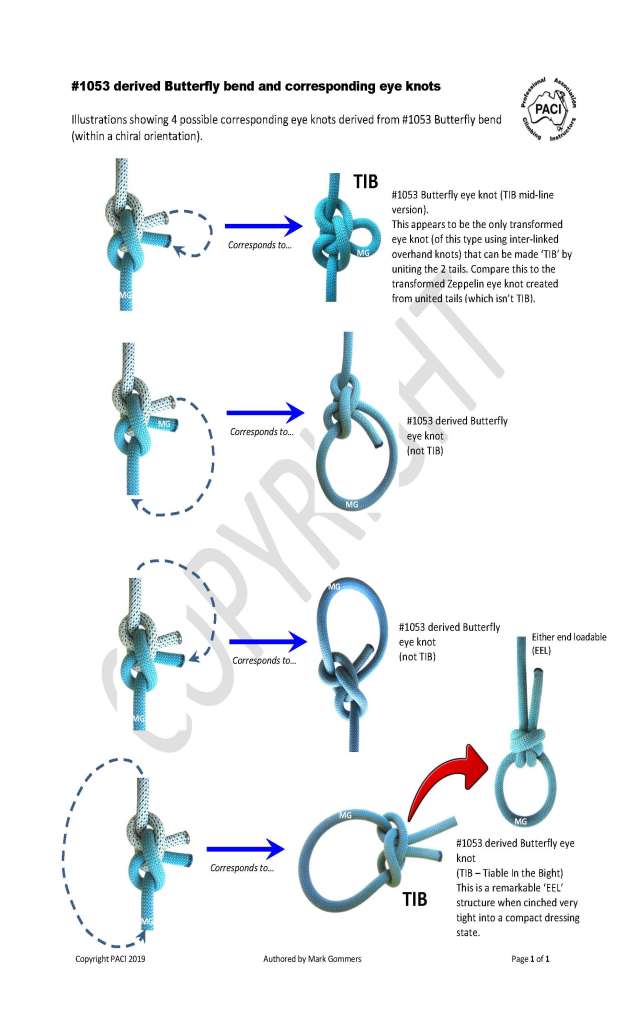
All bends have 4 corresponding eye knots (within a chiral orientation).
Harry Asher may have been first to publish the relationship between a bend and its corresponding eye knot(s)..although he didn't explore the conceptual framework fully. For example, he didn't illustrate or provide clear examples of all the possible corresponding eye knots (of which there are 4) for any given bend. At page 81 he illustrates merely one eye knot derived from his 'Corrick bend'. It astonishes me that he didn't focus on the #1053 derived Butterfly bend and then illustrate each of the 4 possible eye knots. Had he done so, his work would have been significantly improved and, it might have led him to the discovery of the remarkable 'Mobius Butterfly'. Furthermore, it also astonishes me that he didn't illustrate each of the 4 possible eye knots derived from #1431 Sheet bend (which would also have provided opportunities to explore and discuss the 'anti-Bowlines' - which some identify as Cossack/Kalmyk loops).
However, the moment the loop is loaded the structure transforms into a triaxial structure, although still in a single two dimensional plane.
I am of the view that this comment is factually incorrect.
I am not attempting to start an argument with Derek - rather - it is a point of clarification.
If the eye of a #1053 Butterfly is loaded, it is possible for only one (1) SPart to be subjected to load.
Eye loading direction must be defined - and it will be either in the 'S' direction or the 'Z' direction.
It is perfectly possible and indeed nominal to anchor one SPart (ie anchor one end of a rope) and then load the [i]eye [/i]of the Butterfly. The opposite SPart (ie opposite end of the rope) can be unloaded (ie free of tension force).
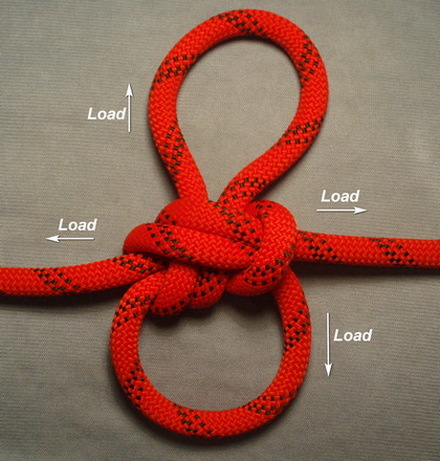
It is possible to subject #1053 Butterfly to a tri-axial loading profile.
Indeed, rope access technicians routinely employ #1053 Butterfly in their anchor systems.
In such employment, the eye of the Butterfly is enlarged (lengthened) substantially - and attached to a fixed anchor point. Both SParts are also loaded (one SPart is also attached to a fixed anchor point and the other end becomes the abseil line).
Then of course, if the loop becomes ring loaded the structure immediately switches into a quadaxial state in three dimensions,
Depends on [i]precisely [/i]what you mean by the term 'ring loading' of the [i]eye [/i](which you term a 'loop').
In the ordinary English dictionary meaning of the word ‘ring’ - this is something of a round or circular geometry.
It is possible that when you choose to use the term ‘ring loading’ of a an eye - you actually mean a transverse loading profile?
However, even if the descriptor ‘transverse loading’ of the eye was advanced - a direction would still need to be specified.
For example, the eye of a Butterfly knot could be subject to a transverse loading profile in axial alignment with the SParts.
In contrast, it is also possible to apply a transverse load to the eye in a perpendicular direction with respect to the SParts.
Indeed, I could go a step further…and apply a circumferential load to the eye (ie hoop stress).
The Mobius Butterfly (1 of the 4 corresponding eye knots of the Butterfly bend) is remarkable due to the range of loading profiles that the eye can sustain.
Vertical rescue teams and rope access technicians can subject the eye of a Mobius Butterfly to a circumferential loading profile (eg in floating anchor points).
One could advance an argument that ‘ring’ loading is in fact circumferential loading.
Thank you agent_smith, it was a rather rushed estimation of BTL’s profile stability for the structure presented at reply#30. You are very right, i should have loaded it much more to trace this vulnerability.
Nonetheless, if we had induced secondary eye loading somehow, as you correctly propose, as a soft shackle, we would have come closer to a more stable, bowline-like response.
I really can’t think of a pure BTL application, besides the loading of an analogous monoaxial bend structure, or the isolation of a damaged rope section.
I do appreciate the attached photo, which demonstrates the use of a tri-axially loadable midline eyeknot, as part of an anchor system.
The second structure at reply#31, is certainly an improvement for the BTL profile stability, and indeed it’s analogous with #1431 sheet bend.
In terms of eye loading, only one of eyes can be loaded in both axial directions (with respect to an SPart).
I'll refer to this particular eye as the secondary eye (which structurally functions as a 'tail').
The primary eye is not loadable in both axial directions…however it appears to stable when loadable in one axial direction only.
I am sure you mean, the axial direction, where the Spart is a direct continuation of the collar. I mostly agree, it appears that the previous vulnerability problem, now passes to the eye loading level ( with respect to the leftmost Spart and the primary eye), which i think is resolved by loading the secondary eye simoultaneously.
The corresponding bend, also appears to feature similarities with #1492 strap bend?
The structure at reply#34, posted by agent_smith, gives me an idea of developing a figure eight based inline knot, which i haven’t done so far, as part of a two eyeknot (in-line/end of line), eight-based, anchor system.
I believe it’s legitimate to form an inline, eight like topology, as shown in the attached images, that can be tri-axially loaded through this anchor scheme, in conjuction with the eight based, end of line, pseudo bowline.
This stable and secure configuration, mostly focuses on the ease of untying.
Irrespective of some closed “eye”,
unloaded it is, and, well, it’s not a loading factor;
so how are you making this, nevertheless,
BIaxial --when, in “through loading”, there
is but this “through” axis loaded?
In order to re-classify as a 'bend' - there must (by definition) be a [i]unification of 2 ends[/i].
Since #1053 Butterfly does not have a unification of 2 ends, it remains an eye knot (not a 'bend').
Not by my definitions, beginning with some "tangle".
There, and eye knot might lack an eye --because I'm
looking only at the "loading profile" that puts (canonical)
End-1 vs. End-2 + End-A (which I don't look out beyond
their *endness* to assess connection. --a view that in
practical conditions runs into trouble vis-a-vis actual
loading (something that can obtain even WITH and eye,
but typically to a minor degree, brought about w/friction
such that eye-leg loading is imbalanced).
--which is to say that the above is a formal way of seeing
things, to look just at a "nub" and its "ends" only insofar
as they depart the nub (and might be loaded).
(not sure to what benefit this formality reaches, yet!).
As for “bend”, since that word has rich enough historical
nautical meanings of making fast and e.g of “bending sails…”,
I do not any longer follow Ashley’s push to a new definition,
and will use “ends joint” and maybe just “joint” --to rid another
possible “E” initial in our terms (End / Eye / Either …)!
However, there is a correspondence between a 'bend' and an eye knot.
All bends have [b]4 [/b]corresponding eye knots (within a chiral orientation).
What four do you see for butterfly knot put in my
notation of End-1 vs. End-A w/eye legs End-2 & End-B?
The traditional one is End-1 vs. End-2 + A, B unloaded.
If asymmetric, really we need to add End-A vs. End-B + 1,
2 unloaded. (If symmetric, one gets a duplicate here.)
Now, the butterfly already departs from this trad.
notion, by having (in reference to joint 1-v-A),
End-1 vs. Ends 2 + B (poor End-A going from full
loading to zero!). So, you then replicate this for
End-A (and this is an asymmetric knot), and ... four?
And not taking the joint's tails (2 & B) into having a
turn at eye-knotting? (which would beget a 2nd foursome).
This could/should be put out for the full exploration of
the *tangle*, perhaps; or at least the possibility noted
in some way, as some relation --it exists, after all
(not necessarily in a practical way, though).
I suppose one can see your four-counting making
better sense to be derived from a “bend joint”
–as you keep one or other of the initial SParts–;
mine (getting 2 x four) for a tangle, which is
available to all loading profiles.
As for eye-to-joint correspondence, there are other
possible relations, as I’ve shown :: where one ties
one joint SPart to a SPart that is the pair of legs of
a bight (which becomes the eye), and figures out
which bight end to fuse with the SPart’s piece’s
other end (the End-2).
It astonishes me that he didn't focus on ... ,
it might have led him to the discovery of ...
Guilty! But "it might have led ..." can keep one from
eating dinner, getting to bed, going to the knot one
PLANNED to illustrate --so as to liberate a tied-up play rope--
but instead of that small forward step of documentation one
now has taken two steps backwards w/further *new* knots.
(Recently, on seeing a likeness in one knot-form/tangle to
another, which I'd found amenable to "fore<->aft'ing", an
operation on eye knots where one fuses end + tail and cuts
the eye to be their replacements,
I moaned "oh, no, not all that to do for this one, too!"
(([u][i]Hitchhiker's Guide to the Galaxy[/i][/u]:
"But Marvin, there's a whole new life opening up in front of you," said Zaphod.
"Oh no, not another one!," came the reply.
))
It is possible to subject #1053 Butterfly to a [i]tri-axial[/i] loading profile.
Some math wizards who addressed this term came to
the conclusion that it is, rather [i]BI-axial[/i]; I'm happier
with some note of *three*, and maybe thus [i]"3-way"[/i].
Be that as it may, the abused term carries the intended
sense to the not-too-educated masses! ;D
Replying to Dan’s post will likely cause the original topic to drift further away…
Trying to be brief and to the point:
how are you making this, nevertheless,
BIaxial --when, in "through loading", there
is but this "through" axis loaded?
Because I think 'BTL' is making it clearer - ie, BTL = Bi-axial Though Loading
Load propagates [i]through [/i]the knot core in a straight line (from SPart-to-SPart)
Not by my definitions
? Curious...
#1053 Butterfly does not involve a unification of 2 separate ropes (a rope join) - the knot is formed from one rope (and is TIB)
However, #1053 derived Butterfly bend does have a unification of 2 ropes (ie, an 'end-to-end' join)
This concept seems simple enough to grasp.
What four do you see for butterfly knot
See attached image...
I suppose one can see your four-counting making
better sense to be derived from a "bend joint"
This statement seems to contradict your previous statement?
Quote
It is possible to subject #1053 Butterfly to a tri-axial loading profile.
Some math wizards who addressed this term came to
the conclusion that it is, rather BI-axial; I’m happier
with some note of three, and maybe thus “3-way”.
Be that as it may, the abused term
Tri-axial is a natural extension of Bi-axial.
I don’t see that as an ‘abuse’ of terms.
Rope access operators routinely subject #1053 Butterfly to a ‘tri-axial’ loading profile (see image below).
Similar concept with #1085 Double F8 (aka ‘bunny ears’) - which also is routinely tri-axially loaded.
EDIT NOTE:
Obviously, there are varying degrees of separation between each ‘leg’ in a ‘tri-axial’ loading profile.
if 60 degree ‘included angle’, then 150 degrees between both legs
if 120 degree ‘included angle’, then symmetric 120 separation between all 3 legs. This would be an interesting angle to load test.
We can use some binding knots(by description) to hitch(as a utility) Constrictor, Ground Line , Bag.
So, less relevance in name game of hitch/bend etc.
There is a naming convention, then also how used too.
The force patterns in Constrictor, Ground Line , Bag CHANGE if same setup used as Hitch or Round Binding utility
per external input linear force imposed to controlling arcs or internal radial force swell instead imposed against same controlling arcs
There is how we visually reference to tie, then how we load framework given as sometimes separate items.
Hitch, Bend etc. classically seem applied to unloaded forms, as point of communication.
In actual usage, look at it all as piping, that terminates at a node deformity (hitch) or continues thru node deformity(bend)
from clean, inline form of no deforming nodes just linear connection thru.
Over Hand knot in single line is just deformity like kinked link in chain; weakens w/o other utility in trade; just a bad deal/trade-off!,
ALSO, a simplest, single Turn single end loaded HH termination is meant to be a 1 Dimensional pull across host ONLY,
BUT, more complex/dual loaded ends HH as a lengthwise pull continuation is more a 2Dimensional usage across host, and then along it too.
.
Naming by visual reference for communication of cold forming; but usually not hot forging into rigidity against loading by usage generally.
So we say Clove is 2 HHs as mnemonic guide, but 1st crossing serves lesser over greater force: Crossed Turn
then 2nd crossing of Bitter End does serve greater over lesser to more Nip, but not a strong hitch pressure as 1st crossing trestles the crossing over a more rigid SPart than Bitter End, so 2 factors of less than normal hitch pressure: trestle and then by neighboring more rigid ropePart together for less pressure to nip/secure Bitter End. BUT, visually to direct, we oversimplify past correct force imagery to saying 2 HHs.
.
Both functions(terminate and couple both) found under 1 of the simplest knot form names HH( 1st knot chapter_21#1602 right angle pull) as a single terminating form.
and then HH(1st knot lengthwise pulls next chapter__22#1733 and strategy dominating form in single loaded leg forms) as a pre-fix to other termination or coupling like placed before Timber etc. in simplest lessons ABoK shows.
then Fig.8(_21#1666) Hitch style of take the long way home evolution of HH, evolves to Marl(ine)#3115 pre-fix
Just as can show HH termination from input/stop to dual loaded sides of back to back HH termination functions to same center point and have a HH termination form, same is true of fig.8 termination to Marl continuation as a double sided version.
Pull 1 leg of certain form is a Cow, both legs is a Girth. Clove force patterns not so clearly defined(errant like HH.
Should watch force pattern that rope pattern is just a support structure to control against that force, but depends on how force ported thru. Host geometry important for geometry/shape it lends to rope form when forged rigid/loaded.
Should always note if force pattern of 1 or both ends noted, just as with Over Hand as stopper or errant ‘bent link’ in chain of no other function.
Bend function to me is more complex form of simpler Hitch termination, Just as HH simpler termination or dual ends loaded continuation, and as simpler Fig.8 or more complex Marl pre-fixxing.
.
So to continue a line of force from 2 segments, can hitch/terminate each to opposing side of same host/chain
OR leave out the 3rd party and take each other as hosts as a Bend, but still can be viewed as pull either end and trace that domain of competing force to then test other end the same way, to divide the continuation back to 2 terminations on shared host chain/themselves.
.
As applies to BFly.
This again here to me is all a structural geometry and
0Dimension is a point, dot; w/o equal & opposite end point >> so can not be a complete force pair.
1Dimension is a line ,axis; w/ equal & opposing end points >> simplest force representation.
SPart to SPart on BFly is 1 single axis of competing points, each headed to displace in opposing directions along the same axis.
.
BFly Eye can mainly be pulled either along this single axis, or load to shear across this axis for another axis in normal use
3 lines from center can be pulled, 4 if cut eye open. Simplest dimension of axis reigns until it’s until Achille’s Heel of cross axis, that defines 2nd dimension’s range makes compound situation, until the cross axis of 90 bearing across both dims at once, forms more complex situation of 3 dimensional forces.
.
Triaxial may be better term if all 3 points pulled 60degrees from each other AND equally loaded like inverse tripod.
Other wise would think would mostly see as a single MAJOR loaded axis of equally loaded points with a lesser shearing across pull if expressing some force across 90 from that main axis reign.
Even a Y yoke shape of 1end + eye pulling against other end would have 2 concerted to shared centerline pulls against a larger i think, maintaining single axis framework(Trucker’s).